
Chunyang Cheng, Yuanbo Huang, Xin Lu, Lingli Xu, Min Li, Xinnan Fan, Xuewu Zhang. Lane Detection Based on Active Infrared Filter and Around-View Imaging[J]. Laser & Optoelectronics Progress, 2018, 55(12): 121014
- Laser & Optoelectronics Progress
- Vol. 55, Issue 12, 121014 (2018)
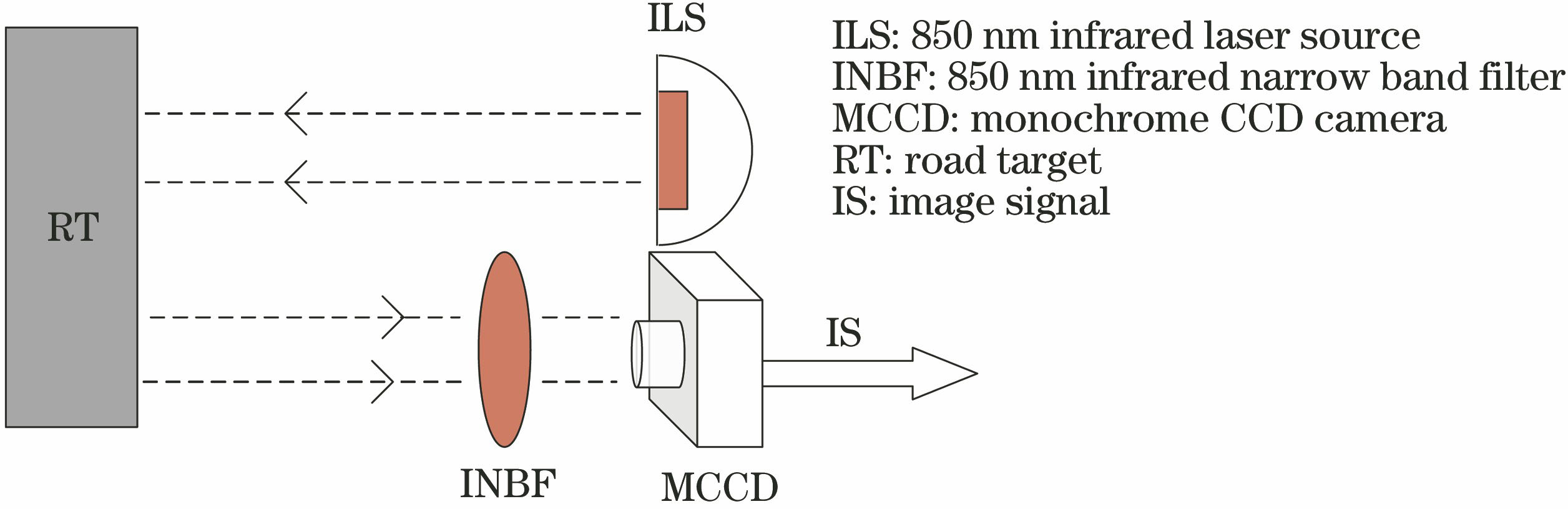
Fig. 1. Active infrared filter imaging system
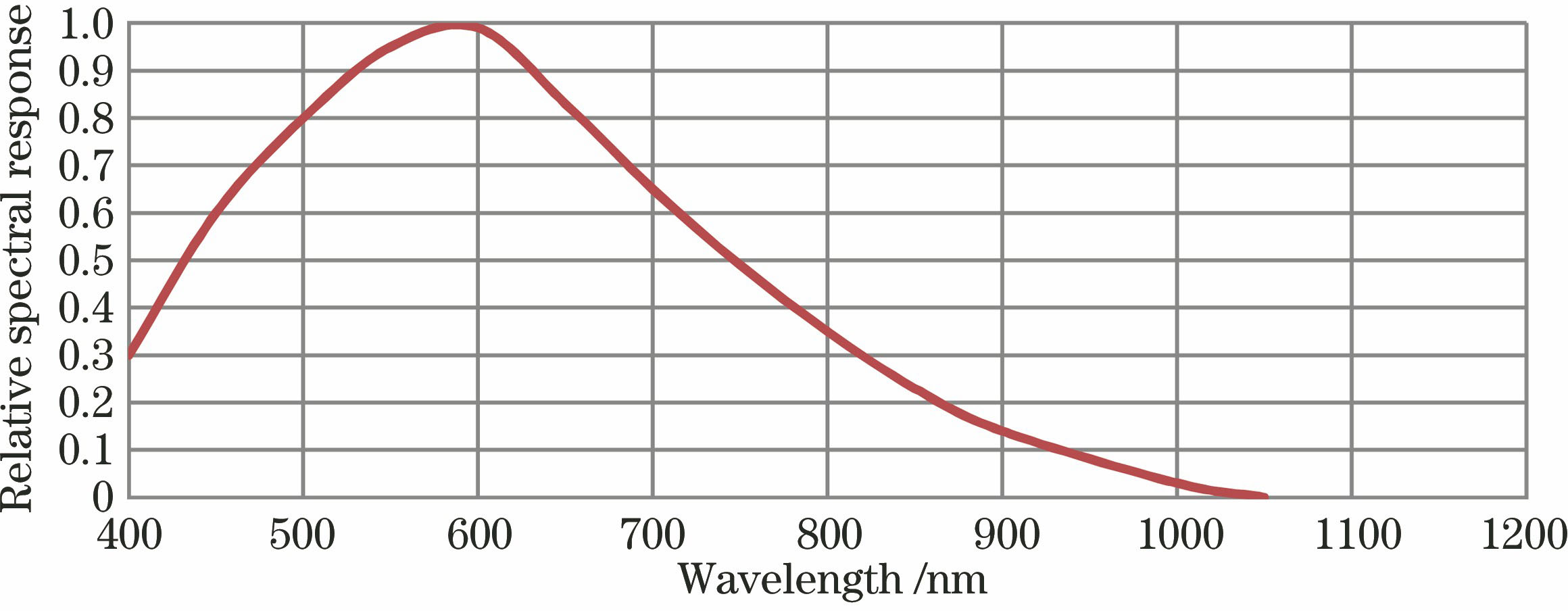
Fig. 2. Spectral response curve of CCD camera
Fig. 3. Setup for around-view imaging. (a) Calibration model; (b) around-view image
Fig. 4. Process of lane detection
Fig. 5. Procedure for lane detection. (a) Segmentation of road background; (b) left and right edge point; (c) clustering result
Fig. 6. Template of lane marking
Fig. 7. Contrast of imaging effect. (a) Imaging effect of color CCD in daytime; (b) imaging effect of infrared filter in daytime; (c) imaging effect of color CCD in night; (d) imaging effect of infrared filter in night
Fig. 8. Results of lane detection. (a)(b) Arrows; (c)(d) words; (e)(f) guide lines; (g)(h) covered by cars; (i)-(l) changing lanes
Fig. 9. Lane detection results for 1000 consecutive frames
| ||||||||||||||||||||||||||||||||||
Table 1. Performance comparison of lane detection system%

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20