
Taifei Zhao, Kaixin Rong, Dandan Cao, Shuang Zhang. Clustering Optimization Algorithm for Unmanned Aerial Vehicle Formation Based on Ultraviolet Security Communication[J]. Laser & Optoelectronics Progress, 2022, 59(13): 1306004
- Laser & Optoelectronics Progress
- Vol. 59, Issue 13, 1306004 (2022)
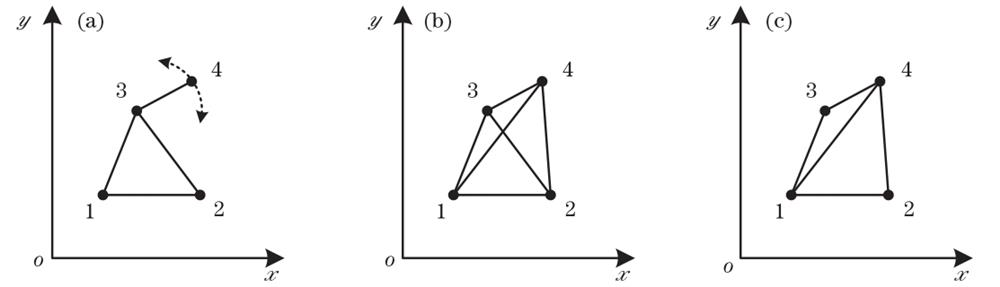
Fig. 1. Rigid and deformable graphs. (a) Deformable graph; (b) rigid graph; (c) minimum rigid graph
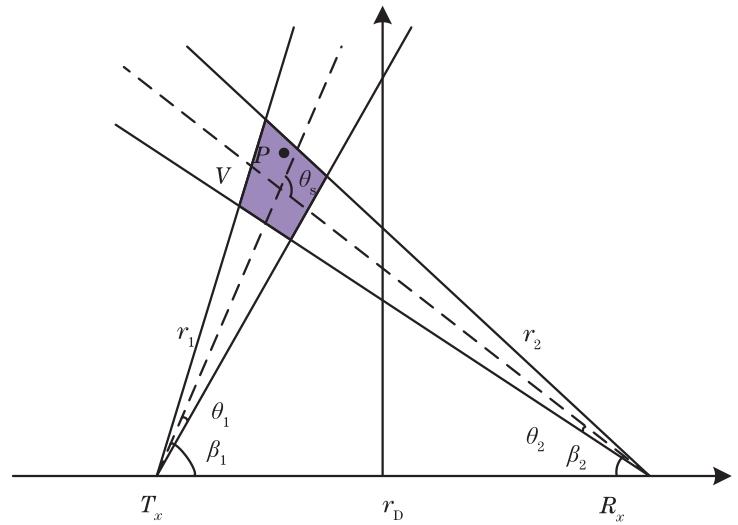
Fig. 2. Single scattering link model of ultraviolet light
Fig. 3. Energy consumption model of inter-machine ultraviolet communication
Fig. 4. Clustering model of the UAV formation
Fig. 5. Communication link graph of different algorithms. (a) LEACH algorithm; (b) COAORG algorithm
Fig. 6. Comparison of performance of different algorithms. (a) Number of survival nodes; (b) remaining energy; (c) data transfer amount
Fig. 7. Number of cycles when the first node dies
Fig. 8. Comparison of network lifetime
Fig. 9. COAORG algorithm performance. (a) Survival nodes; (b) remaining energy
Fig. 10. Time of death of the first node at different packet length
Fig. 11. Network lifetime of different packet lengths
|
Table 1. Generation process of optimal rigid graph
|
Table 2. Simulation parameter setting

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20