
Baiqiu Zhao, Xiaonan Yu, Yan Dong, Lizhong Zhang, Shoufeng Tong. Tracking Performance of Mirrors in Space Laser Communication Networking[J]. Laser & Optoelectronics Progress, 2021, 58(9): 0906007
- Laser & Optoelectronics Progress
- Vol. 58, Issue 9, 0906007 (2021)
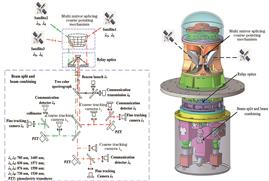
Fig. 1. Schematic diagram and three-dimensional diagram of main optical terminal of networking laser communication
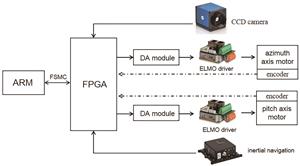
Fig. 2. Composition of servo subsystem
Fig. 3. Optical closed loop with velocity loop as inner loop
Fig. 4. Optical closed loop with position loop as inner loop
Fig. 5. Posture, velocity, and acceleration curves of six axis swing table. (a) Posture; (b) velocity; (c) acceleration
Fig. 6. Tracking miss distance obtained by optical closed loop. (a) Based on position loop; (b) based on speed loop
Fig. 7. Simulation block diagram of Simulink optical closed loop based on velocity loop
Fig. 8. Simulation block diagram of Simulink optical closed loop based on position loop
Fig. 9. Tracking miss distance of Simulink optical closed loop. (a) Based on speed loop; (b) based on position loop
Fig. 10. Position curves of motor starting at velocity of 0.01 (°)/s. (a) Low speed starting based on position loop; (b) stable motion based on position loop; (c) low speed starting based on velocity loop; (d) stable motion based on velocity loop
Fig. 11. Tracking error under different feedforward gains

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20