
Bin Hou, Shangzhong Jin, Yun Wang, Zhihui Cheng, Xinyi Cao. Comparison of Point Cloud Registration Methods in Coarse Registration[J]. Laser & Optoelectronics Progress, 2020, 57(8): 081502
- Laser & Optoelectronics Progress
- Vol. 57, Issue 8, 081502 (2020)
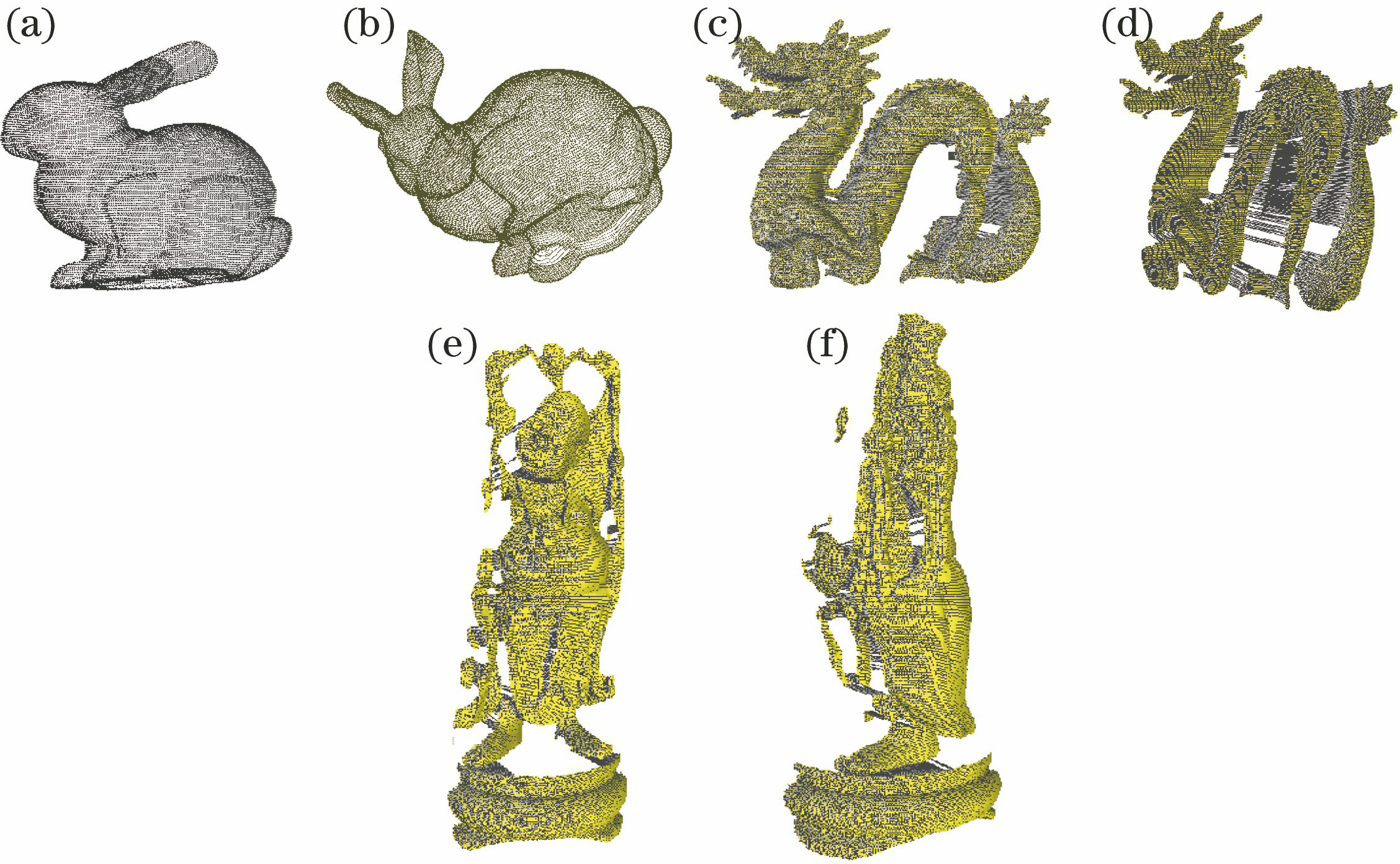
Fig. 1. Point cloud model. (a)(b) Bunny at different angles; (c)(d) Dragon at different angles; (e)(f) Happy at different angles
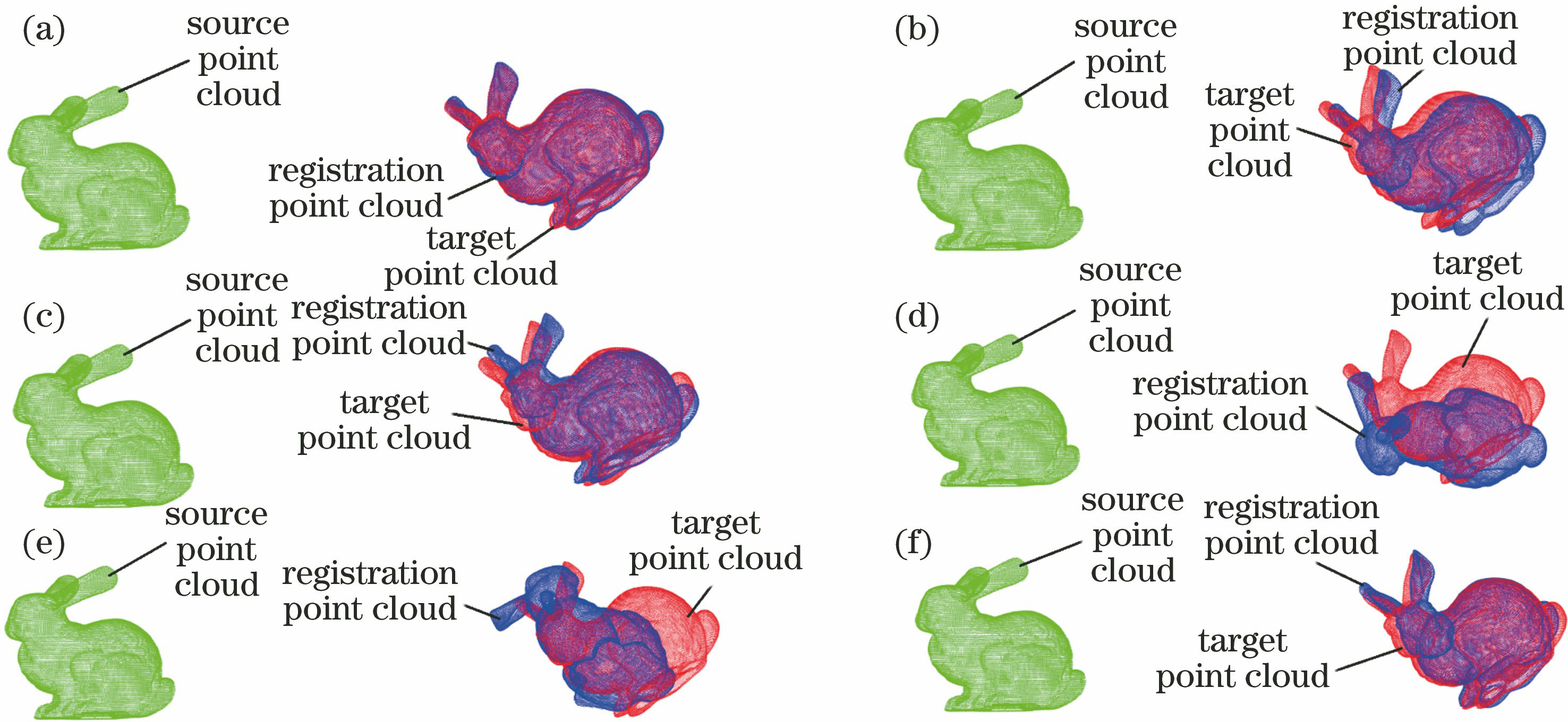
Fig. 2. Registration effect of Bunny point cloud. (a) 3DSC; (b) PFH; (c) FPFH; (d) NDT; (e) ICP; (f) 4PCS
Fig. 3. Registration effect of Dragon point cloud. (a) 3DSC; (b) PFH; (c) FPFH; (d) NDT; (e) ICP; (f) 4PCS
Fig. 4. Registration effect of Happy point cloud. (a) 3DSC; (b) PFH; (c) FPFH; (d) NDT; (e) ICP; (f) 4PCS
Fig. 5. Point cloud registration accuracy. (a) Comparison of rotation accuracy on the x axis; (b) comparison of rotation accuracy on the y axis; (c) comparison of rotation accuracy on the z axis; (d) comparison of translation accuracy on the x axis; (e) comparison of translation accuracy on the y axis; (f) comparison of translation accuracy on the z axis
|
Table 1. System environment configuration
|
Table 2. Registration times
|
Table 3. Rotation angle error of Bunny point cloud on the x, y, and z axis
|
Table 4. Rotation angle error of Dragon point cloud on the x, y, and z axis
|
Table 5. Rotation angle error of Happy point cloud on the x, y, and z axis
|
Table 6. Translation distance error of Bunny point cloud on the x, y, and z axis
|
Table 7. Translation distance error of Dragon point cloud on the x, y, and z axis
|
Table 8. Translation distance error of Happy point cloud on the x, y, and z axis

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20