
Shuai HAO, Shan GAO, Xu MA, Beiyi AN, Tian HE, Hu WEN, Feng WANG. Infrared Pedestrian Detection Based on Cross-scale Feature Aggregation and Hierarchical Attention Mapping[J]. Acta Photonica Sinica, 2022, 51(6): 0610006
- Acta Photonica Sinica
- Vol. 51, Issue 6, 0610006 (2022)
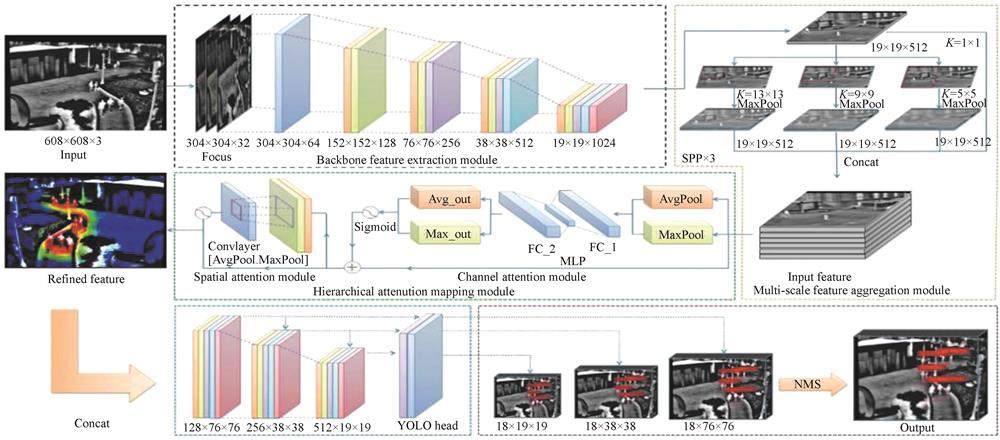
Fig. 1. Flow chart of detection algorithm
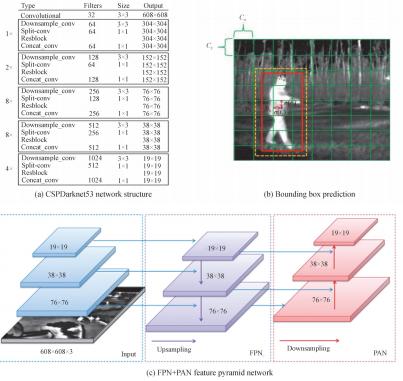
Fig. 2. YOLOv4 object detection algorithm
Fig. 3. Focus slice sampling principle
Fig. 4. Focus+CBM network structure
Fig. 5. Spatial pyramid pooling structure
Fig. 6. Multi-scale feature aggregation module based on spatial pyramid pooling
Fig. 7. Hierarchical attention mapping module based on CBAM
Fig. 8. Comparison of saliency distribution
Fig. 9. Comparison of scale distribution in test results
Fig. 10. Comparison of visualization detection results
Fig. 11. P-R curve comparison of different algorithms
Fig. 12. Performance curve of the CFAHAM algorithm
Fig. 13. Detection experiment under noise condition
Fig. 14. Detection results under occlusion conditions
|
Table 1. Experimental environment configuration parameters
|
Table 2. Comparison of detection results of different strategies
|
Table 3. Comparative experimental results of different detection algorithms
|
Table 4. Comparative experimental results of different detection algorithms after adding noise

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20