
Qiaoqiao Yuan, Guang Zhang, Xijiang Chen, Weiqing Xu. Regularization of Point Cloud Features by Fusing Improved Canny Algorithm[J]. Laser & Optoelectronics Progress, 2019, 56(16): 162801
- Laser & Optoelectronics Progress
- Vol. 56, Issue 16, 162801 (2019)
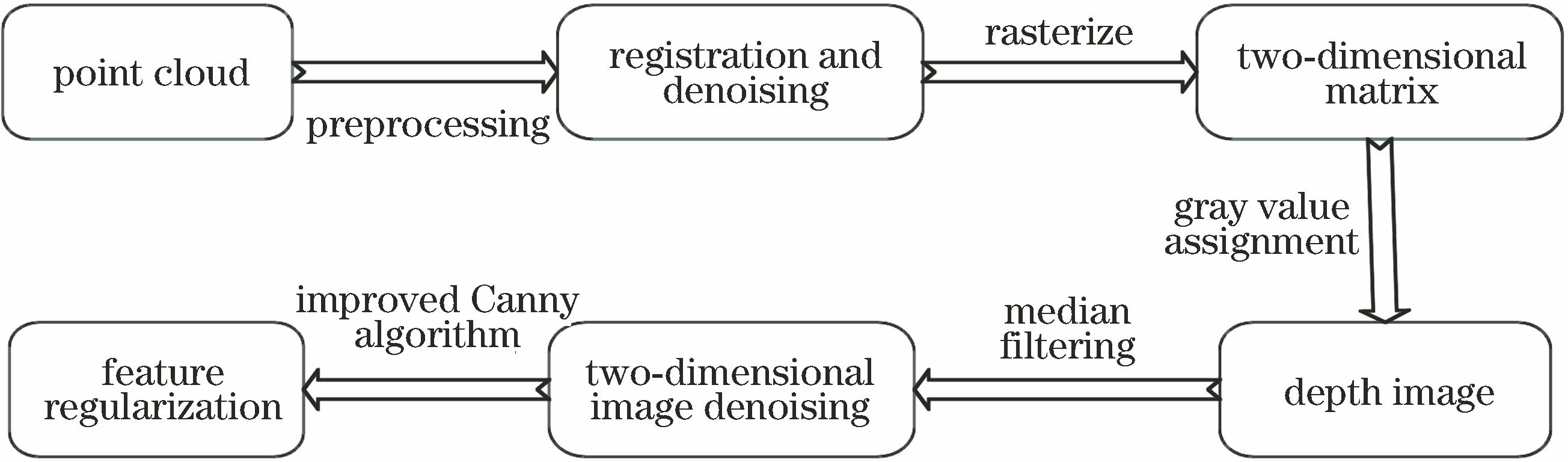
Fig. 1. Flow chart of algorithm
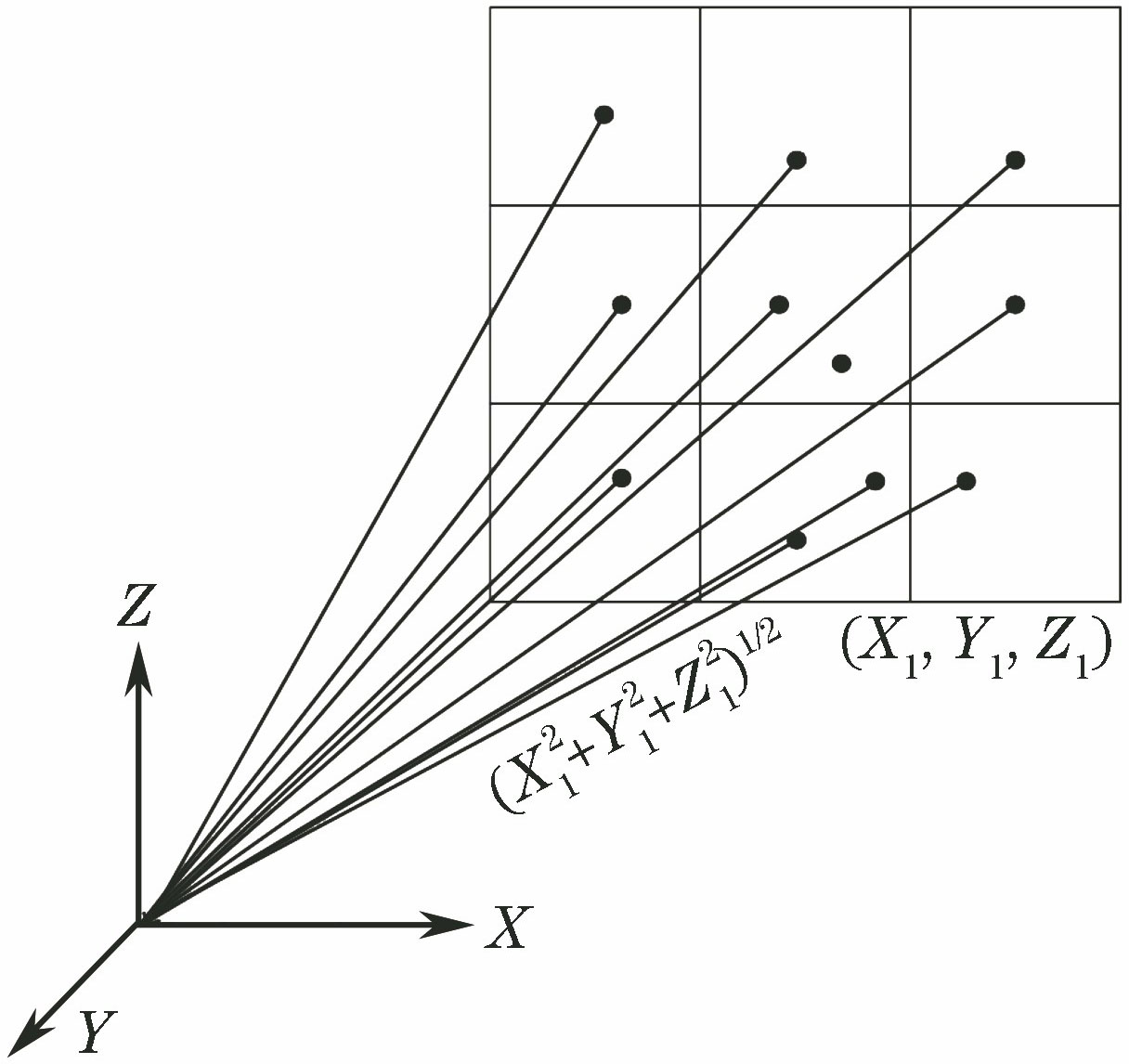
Fig. 2. Point cloud rasterization assignment
Fig. 3. Determination of projection direction
Fig. 4. Average grayscale of grids
Fig. 5. Eight neighborhood search assignment
Fig. 6. Comparison of different algorithms for sculptural regularization. (a) Original point cloud; (b) proposed algorithm; (c) traditional Canny algorithm; (d) 8N-DD algorithm
Fig. 7. Comparison of different algorithms for window regularization. (a) Original point cloud; (b) proposed algorithm; (c) traditional Canny algorithm; (d) 8N-DD algorithm
Fig. 8. Comparison of different algorithms for column regularization. (a) Original point cloud; (b) proposed algorithm; (c) traditional Canny algorithm; (d) 8N-DD algorithm
Fig. 9. Comparison of different algorithms for dragon boundary regularization. (a) Original point cloud; (b) proposed algorithm; (c) traditional Canny algorithm; (d) 8N-DD algorithm
|
Table 1. Comparison of feature regularization and running time of sculpture model in Fig. 6

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20