
Rongrong Lu, Feng Zhu, Qingxiao Wu, Foji Chen, Yunge Cui, Yanzi Kong. Three-Dimensional Object Recognition Based on Enhanced Point Pair Features[J]. Acta Optica Sinica, 2019, 39(8): 0815006
- Acta Optica Sinica
- Vol. 39, Issue 8, 0815006 (2019)
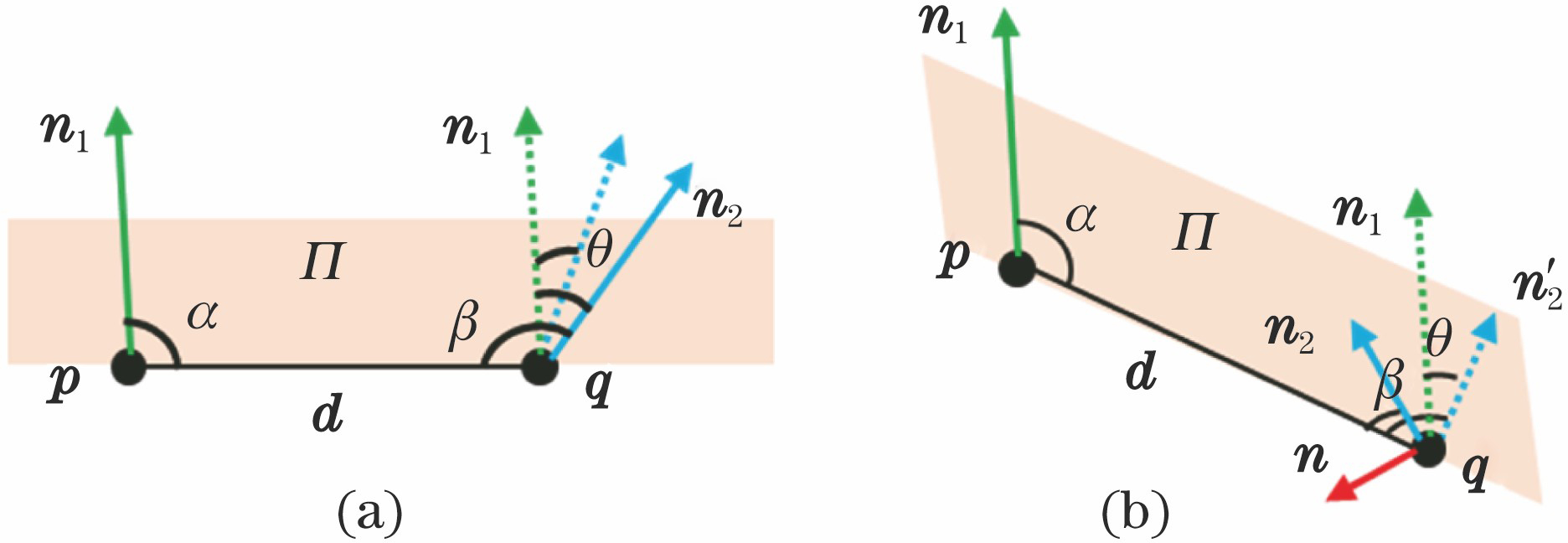
Fig. 1. Schematic of ambiguity of original point pair feature. (a) Front view; (b) side view
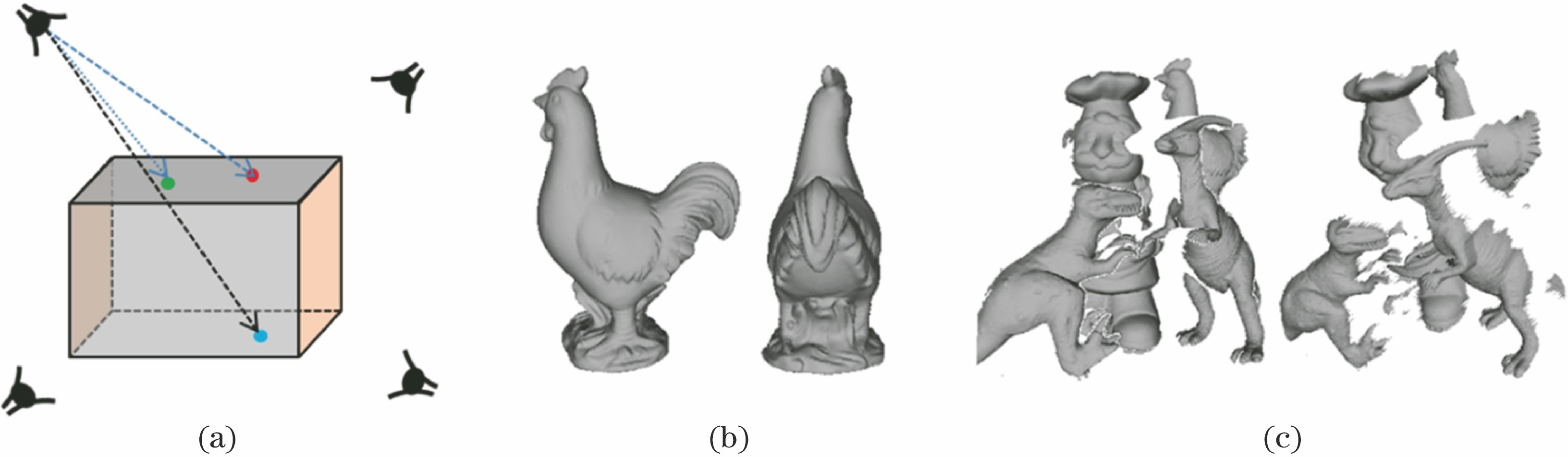
Fig. 2. Visible constraint between viewpoints. (a) Schematic of visible constraint between two points; (b) 3D model; (c) 2.5D scene
Fig. 3. Viewpoint visibility constraint. (a) Location of point p; (b) variations in distribution and number of points satisfying visible constraint with point p with θ
Fig. 4. Flow chart of 3D object recognition based on enhanced point pair feature
Fig. 5. Dataset collected in practice. (a) Glass box and mouse model; (b) dataset R1; (c) dataset R2; (d) dataset R3
Fig. 6. Five models and two sample scenes of UWA dataset
Fig. 7. Recognition results of eight scenes on R1 dataset
Fig. 8. Time cost comparison between EPPF and original PPF based methods on R1 dataset
Fig. 9. Recognition results of four scenes S1-S4 on R2 dataset
Fig. 10. Time cost comparison on R2 dataset. (a) EPPF; (b) original PPF
Fig. 11. Recognition results of five scenes S1-S5 on R3 dataset
Fig. 12. Time cost comparison on R3 dataset. (a) EPPF; (b) original PPF
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Summary of basic information of six target models
|
Table 2. Recognition results of proposed algorithm on whole UWA dataset
|
Table 3. Comparison of two algorithms on the UWA dataset (occlusion of targets is less than 84%) in terms of recognition rate


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20