
Cong Chen, Miao Liu, Jigang Wang, Shourui Yang. Spatial Registration Method for Neuronavigation Using Adaptive Thresholds[J]. Chinese Journal of Lasers, 2022, 49(20): 2007302
- Chinese Journal of Lasers
- Vol. 49, Issue 20, 2007302 (2022)
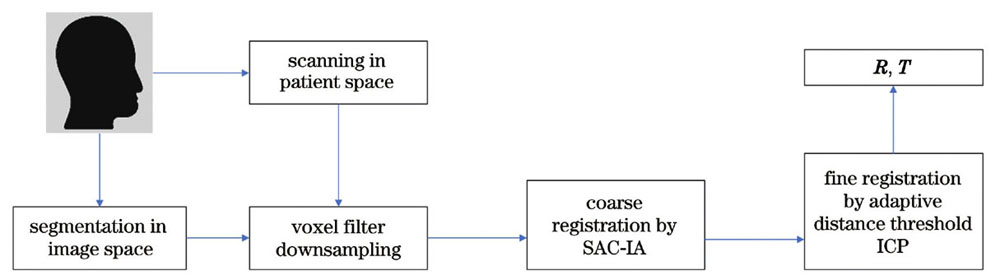
Fig. 1. Flow chart of adaptive threshold registration method
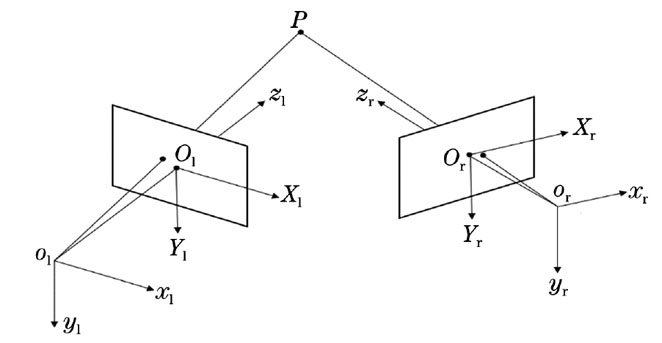
Fig. 2. Schematic of binocular stereo vision
Fig. 3. Picture of face point cloud collection system
Fig. 4. Calculation diagram of fast point feature histogram (FPFH)
Fig. 5. Head model
Fig. 6. Target balls and their labels
Fig. 7. Three-dimensional reconstruction result of CT images. (a) Point cloud of face;(b) point cloud of target balls
Fig. 8. Point clouds of face in CT and world coordinate system. (a) CT point cloud; (b) point cloud 0; (c) point cloud 1; (d) point cloud 2; (e) point cloud 3
Fig. 9. Point clouds of face after downsampling. (a) CT point cloud; (b) point cloud 0; (c) point cloud 1; (d) point cloud 2; (e) point cloud 3
Fig. 10. Residual distributions of coarse registration. (a) No deformation; (b) deformation 1; (c) deformation 2; (d) deformation 3
Fig. 11. Counts of each points excluded. (a) No deformation; (b) deformation 1; (c) deformation 2; (d) deformation 3
Fig. 12. Residual distribution of fine registration of general ICP method. (a) No deformation; (b) deformation 1;
Fig. 13. Residual distribution of fine registration of our method. (a) No deformation; (b) deformation 1; (c) deformation 2; (d) deformation 3
Fig. 14. Box plot of mean registration error of two methods
|
Table 1. Transformation parameter range of coarse registration
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Target registration error of our method
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Target registration error of general ICP method

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20