Neuronavigation has been extensively used in neurosurgery, such as tumor resection, tumor biopsy, and minimally invasive craniotomy. By neuronavigation, doctors can select the best surgical path before surgery, and precisely locate intracranial lesions or sites of interest during surgery, which helps reduce the invasiveness of surgery, enhances the treatment effect, and reduces the recovery time of patients. Realizing the registration of medical structure images between the actual surgical spaces is the major step in neuronavigation. An approach based on artificial markers is the most common approach for registration in clinical, which requires numerous markers fixed on the patient’s head and additional medical imaging scans. Alternatively, approaches based on anatomical landmarks and surface matching have been extensively investigated, and both do not require fixed markers. Compared to the method based on anatomical landmarks, the approach based on surface matching has higher precision. Surface-matching approach completes the registration by aligning the face point cloud in image space and patient space. However, because of space-time differences, deformation differences between the two types of face point clouds may exist, resulting in the deterioration of registration precision. Aiming at this problem, this study proposes a registration approach using an adaptive threshold to reduce the effect of local deformation on registration precision.
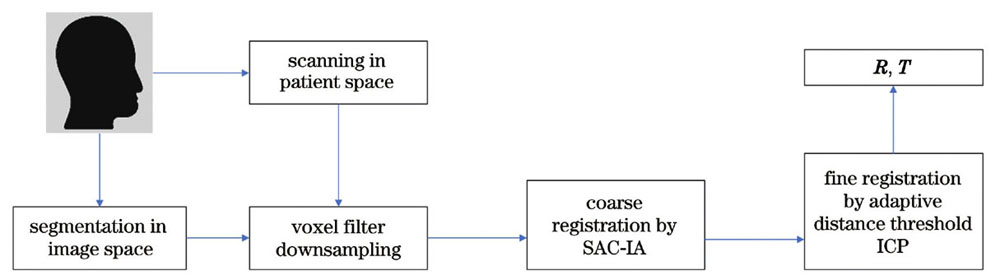
First, the face point cloud in image space is isolated from the reconstructed head medical model, and the face point cloud in patient space is scanned using fringe projection and binocular stereo vision by the point cloud system. Next, using a voxel-based approach, these two face point clouds are down-sampled and denoised. For the face point cloud in the image space and patient space after down-sampling, we employed the SAC-IA algorithm for coarse registration to produce a suitable initial position. We calculated the Euclidean distance between each point in the source point cloud and its nearest point in the target point cloud, and then considered the average of these Euclidean distances as a threshold. Finally, we used the ICP algorithm to conduct fine registration for the final and more precise transformation, while the wrong pairs, which have a distance higher than the threshold in the previous step are rejected and do not participate in the computation of transformation matrix.
We conducted an experiment to demonstrate the target registration error (TRE) of our registration approach using a self-made head model. This head model included simulated targets in the brain and may be locally deformed in the area of both cheeks. We also compared our approach with a general approach, which only differs from our approach in that no distance threshold was employed. In this experiment, four various degrees of deformation were set in the cheek area of the head model (no deformation, small deformation on both sides, substantial deformation on both sides, and small deformation on one side). The registration process between face point clouds in image space and patient space is repeated 1000 times while the corresponding TRE is computed. First, we counted the times each point in the source point cloud was rejected in our approach (Fig. 11). When no deformation occurred, the time of each point did not visibly gather. Moreover, when deformation occurred, the time of each point gathered in the cheek area. Next, the TRE and mean TRE of each target was computed in our approach (Table. 2) and in the general approach, respectively (Table. 3), and subsequently, we compared the mean TRE of the two approaches (Fig. 14). When no deformation occurred, the mean TRE of our approach was 0.55 mm±0.05 mm, which is not substantially different from the 0.55 mm±0.04 mm of the general approach. Corresponding to small deformation and big deformation of both sides and small deformation of one side, the mean TRE of our approach was 0.34 mm±0.10 mm, 0.28 mm±0.06 mm, and 0.56 mm±0.15 mm, respectively, which was substantially 1.81 mm±0.05 mm, 2.59 mm±0.04 mm, and 1.01 mm±0.12 mm of the general approach.
In this research, we propose a fully automatic surface-matching registration approach based on an adaptive distance threshold for noncooperative target neuronavigation. In the counting of times, each point in the source point cloud is rejected, and the finding reveals that the step to reject wrong point pairs in our approach is sufficiently accurate. In the comparison with mean TRE between our approach and the general approach, our approach is similar to the general approach when no deformation occurs, and is more accurate than the general approach when deformation occurs. Moreover, all standard deviation of our approach are not above 0.15 mm, which means that our approach is stable. In conclusion, our approach can reduce the effect of local deformation of the face, so that the spatial registration approach based on surface matching can be better and stably applied to neuronavigation.