
Jiachen Wu, Liangcai Cao, Hailong Chen, Xiang Peng, Guofan Jin. Research Progress of Texture Reconstruction in Color Three-Dimensional Scanning[J]. Laser & Optoelectronics Progress, 2018, 55(11): 110004
- Laser & Optoelectronics Progress
- Vol. 55, Issue 11, 110004 (2018)
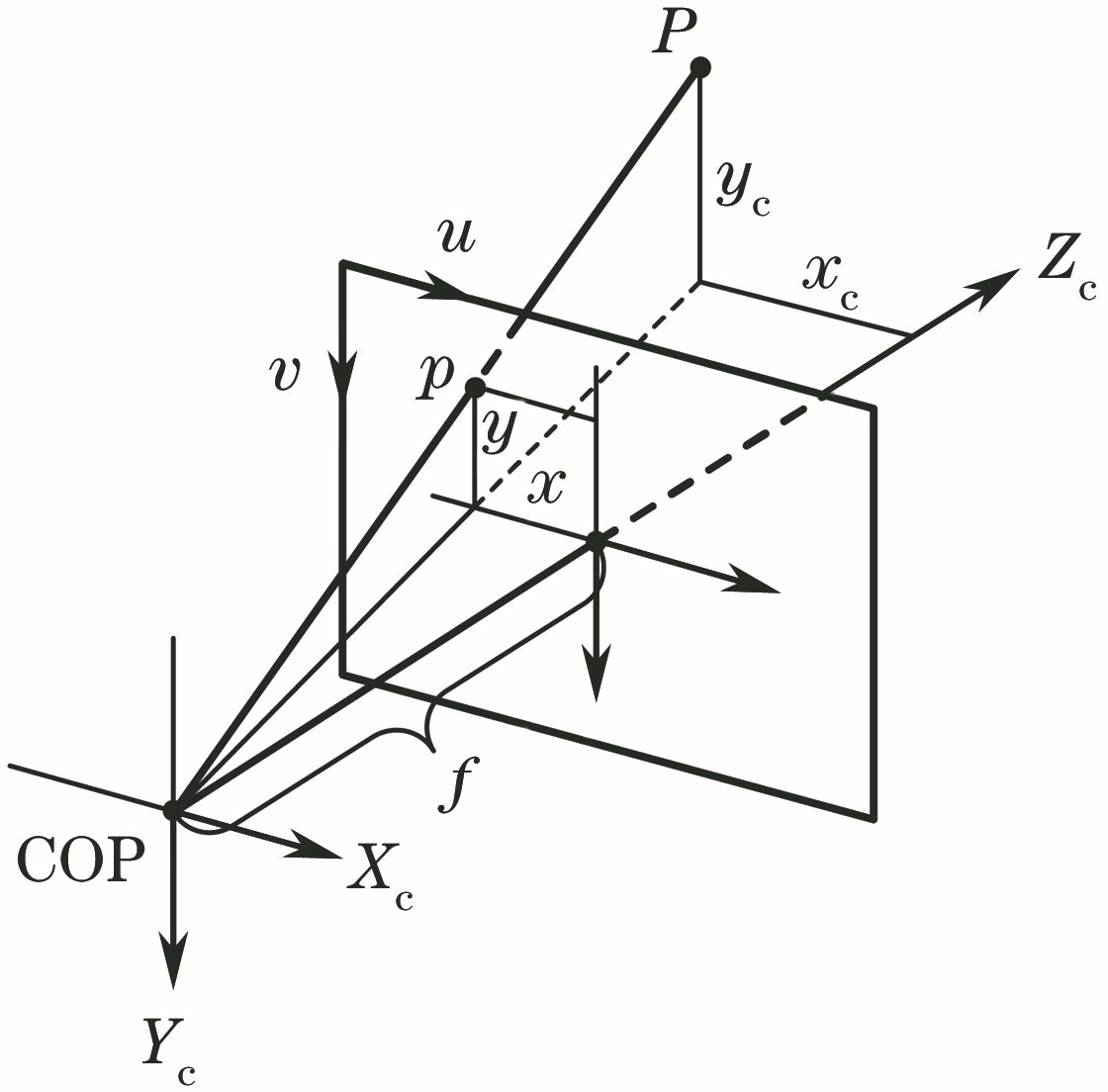
Fig. 1. Pinhole camera model
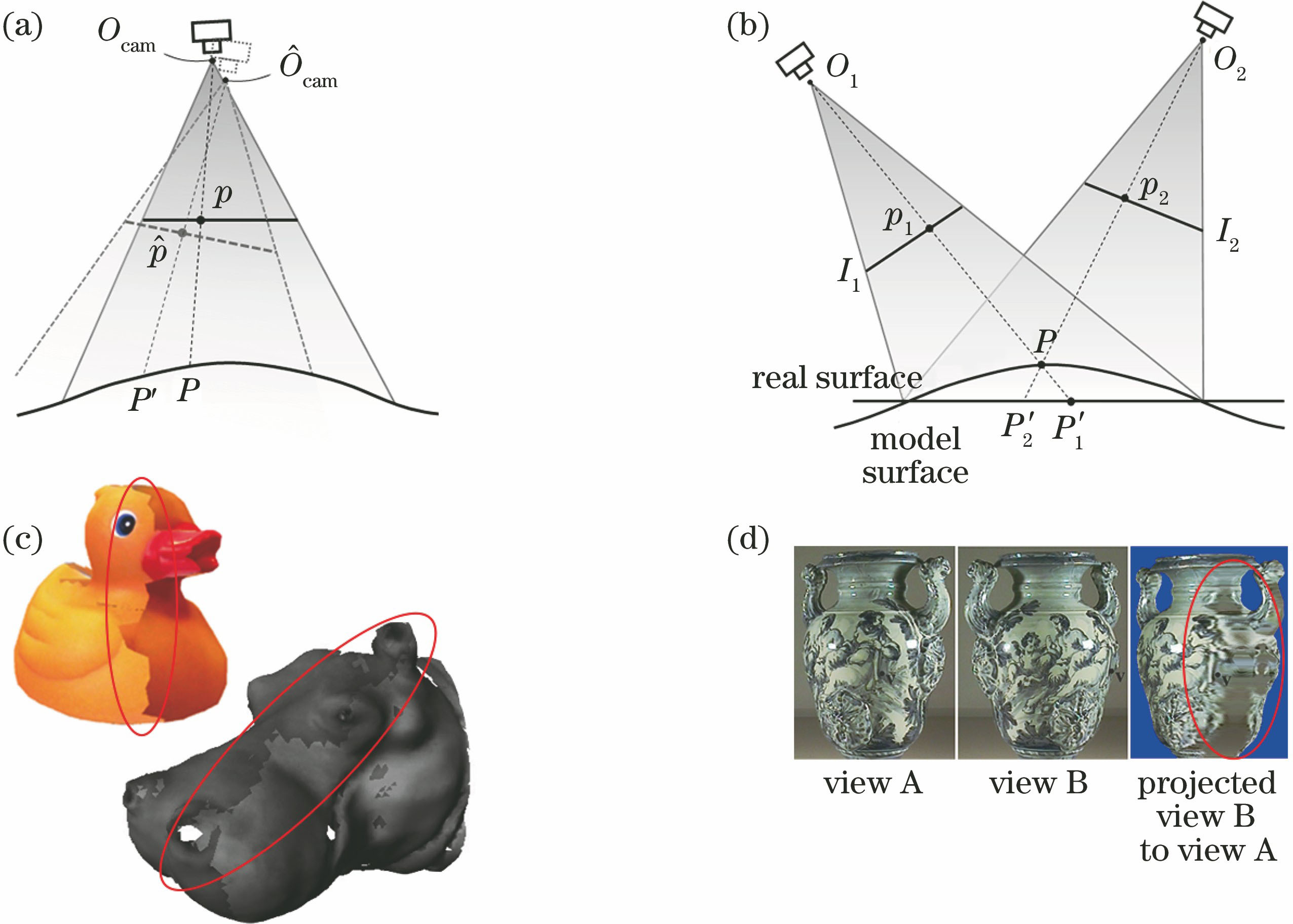
Fig. 2. Causes of the artifacts in texture image. (a) Camera parameter errors; (b) low model accuracy; (c) inconsistent illumination environment; (d) texture aliasing
Fig. 3. Greedy algorithm diagram. (a) Triangulation texture distribution map obtained by texture quality optimal criterion; (b) triangulation texture distribution map redistributed by greedy algorithm
Fig. 4. Composite-weight schematic. From left to right: angle weight, depth weight, border weight, and composite-weight
Fig. 5. BDS function diagram. Left: source image; right: target image. s1,t1 and s2,t2 are two pairs of patches between source and target images which have minimum Euclidean distance, respectively
Fig. 6. Comparison of reconstruction results of different texture reconstruction methods
Fig. 7. Influence of illumination disagreement on the method in Ref.[73]. Each row gives the source texture image and the target texture image in the experiment, and the illumination disagreement increases gradually from top to bottom
Fig. 8. Poisson image editing diagram
Fig. 9. Seam levelling on a circumference. Function values are shown as the height above the circumference. (a) Original function; (b) levelling function; (c) sum of original function and levelling function (minus a constant)
| ||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. SSIM value of different reconstruction methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20