
Yuze Xiao, Xiaodong Chen, Yong Xu, Jin Yang, Jing Sheng, Haolin Liang, Yi Wang. Real-Time Synthetic-Aperture Imaging Algorithm for Ultrasonic Endoscopy Based on Coherence Factor[J]. Laser & Optoelectronics Progress, 2019, 56(2): 021701
- Laser & Optoelectronics Progress
- Vol. 56, Issue 2, 021701 (2019)
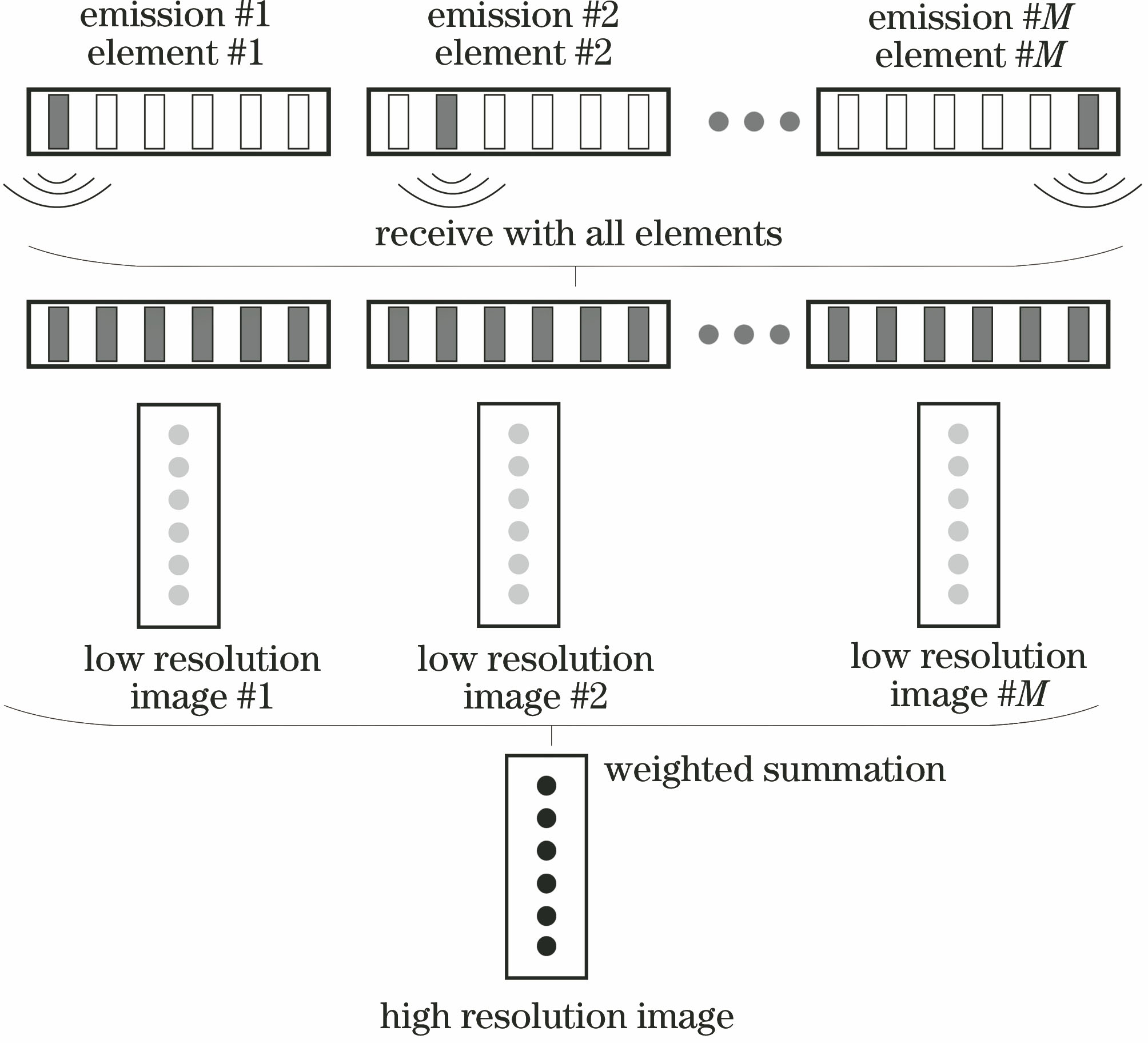
Fig. 1. Implementation of SA
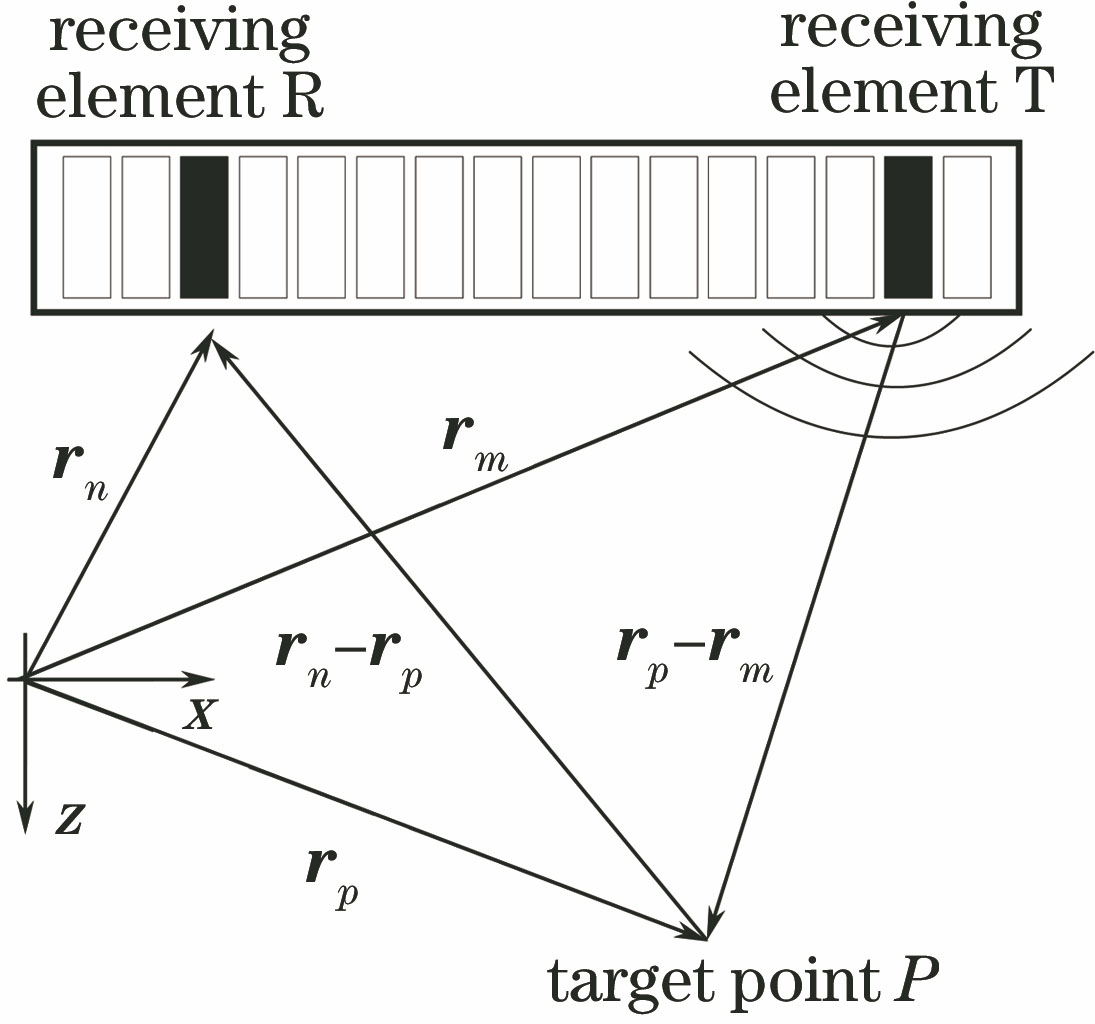
Fig. 2. Calculation of transit time
Fig. 3. Implementation process of parallel processing
Fig. 4. Processing results of SA and CFSA algorithms on CPU platform. (a) Imaging result of SA algorithm; (b) imaging result of CFSA algorithm
Fig. 5. Transverse energy distribution of SA and CFSA algorithms. (a) z=40 mm; (b) z=35 mm
Fig. 6. Processing results of CFSA algorithms on CPU and GPU. (a) Imaging result of CPU platform; (b) imaging result of GPU platform
Fig. 7. Processing results of SA and CFSA algorithms on CPU platform. (a) Imaging result of SA algorithm; (b) imaging result of CFSA algorithm
|
Table 1. Simulation experimental parameters
|
Table 2. Imaging error rate
|
Table 3. Consuming time of various parallel acceleration methods
|
Table 4. Lateral resolution of SA and CFSA algorithms
|
Table 5. Consuming time of SA and CFSA algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20