
Lei Zhang, Shuai Zhu, Tianyu Liu, Yuehuan Wang. Tracking of dense group targets based on motion grouping[J]. Infrared and Laser Engineering, 2020, 49(11): 20200284
- Infrared and Laser Engineering
- Vol. 49, Issue 11, 20200284 (2020)
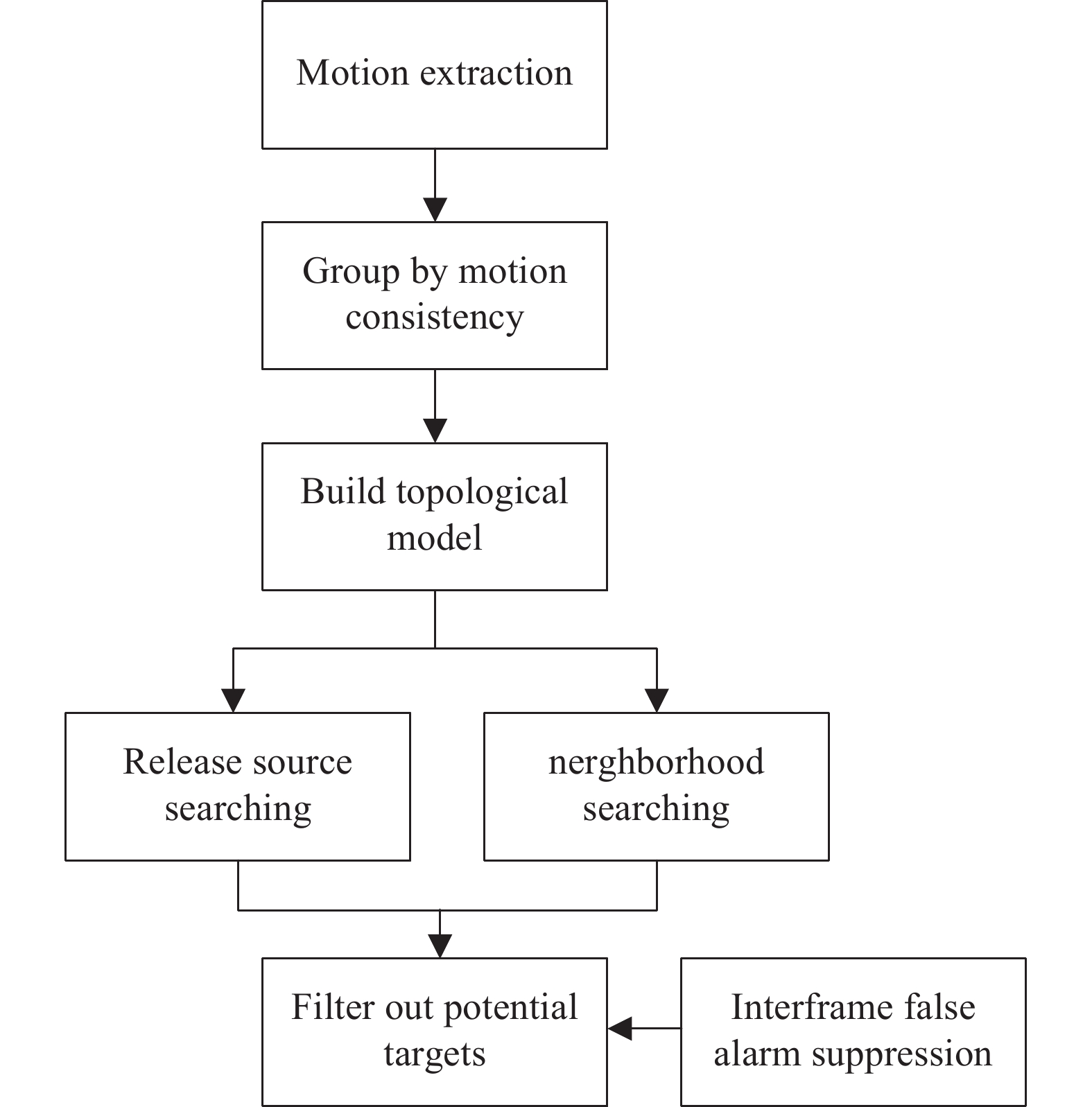
Fig. 1. Flowchart of the proposed algorithm

Fig. 2. Dividing dense target into sparse groups
Fig. 3. Non-neighbor individuals in cluster motion
Fig. 4. Relationship between
and
与路径长度规模
关系图
Fig. 5. Relationship between
and
with regularization factor
引入正则化因子后
与路径长度规模
关系图
Fig. 6. Distribution of group target and extracted optical flow
Fig. 7. Divided group result according to motion patten
Fig. 8. Directed graph model for target group
Fig. 9. Result of marked potential target in target group
Fig. 10. Track of potential target in target group
Fig. 11. Grouping performance comparison
Fig. 12. Real-time performance comparison
|
Table 1.
Result of collectiveness matrix
聚集度矩阵结果
|
Table 2.
Result of adjacency matrix for directed graph
有向图邻接矩阵结果
|
Table 3.
Tracking result without interframe suppression false alarm
未采用帧间虚警抑制跟踪结果
|
Table 4.
Tracking result with interframe suppression false alarm
采用帧间虚警抑制跟踪结果
|
Table 5. Dual suppression matrix
对偶抑制矩阵
|
Table 6. Dual suppression matrix
对偶抑制矩阵


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20