
Yujing Qiao, Shengbiao Gao, Yanchao Pi. Optimization Method of Node Pose for Measurement Network Based on Multi-View Stereo Vision[J]. Laser & Optoelectronics Progress, 2019, 56(5): 051501
- Laser & Optoelectronics Progress
- Vol. 56, Issue 5, 051501 (2019)
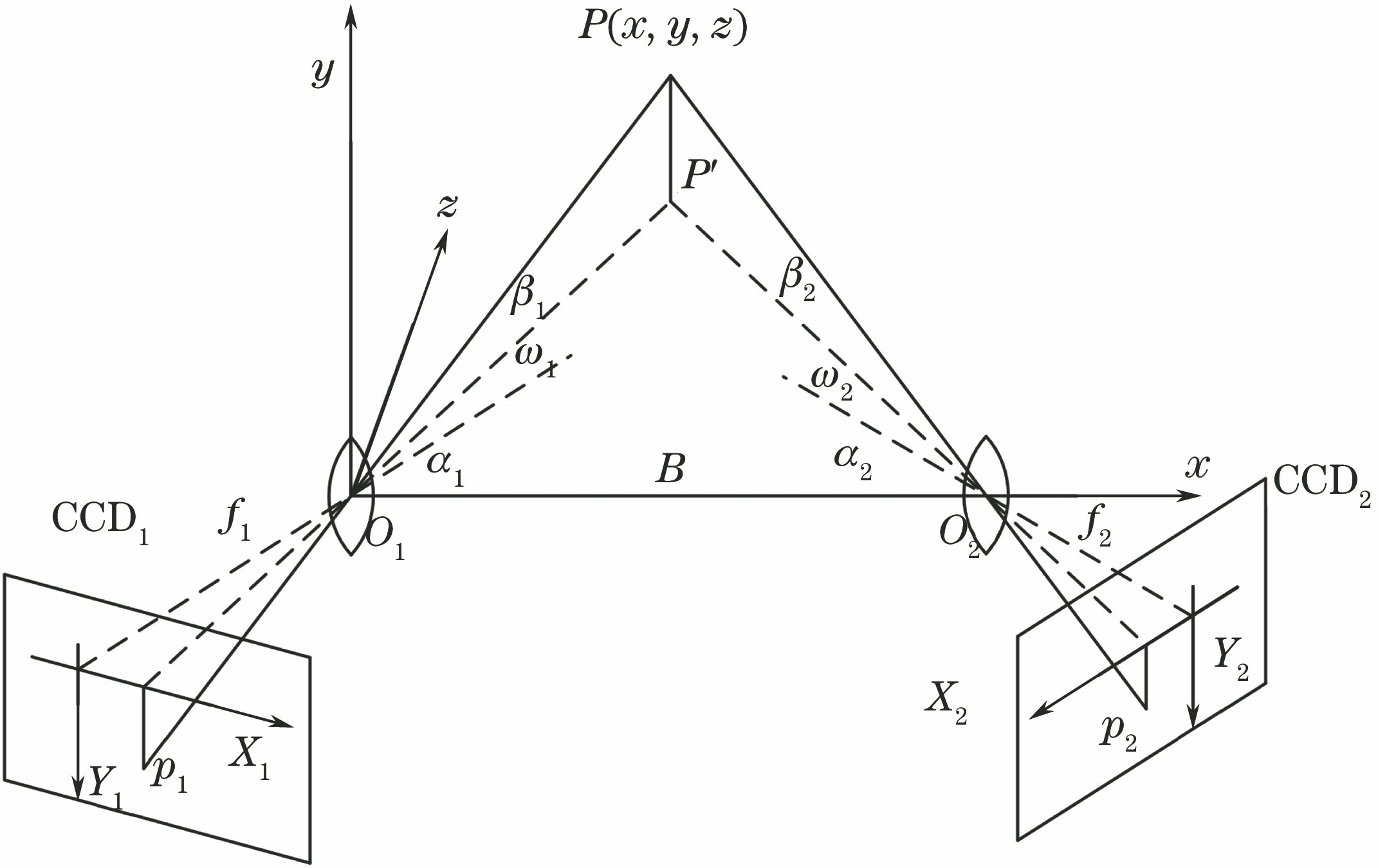
Fig. 1. Measurement principle of binocular stereo vision system
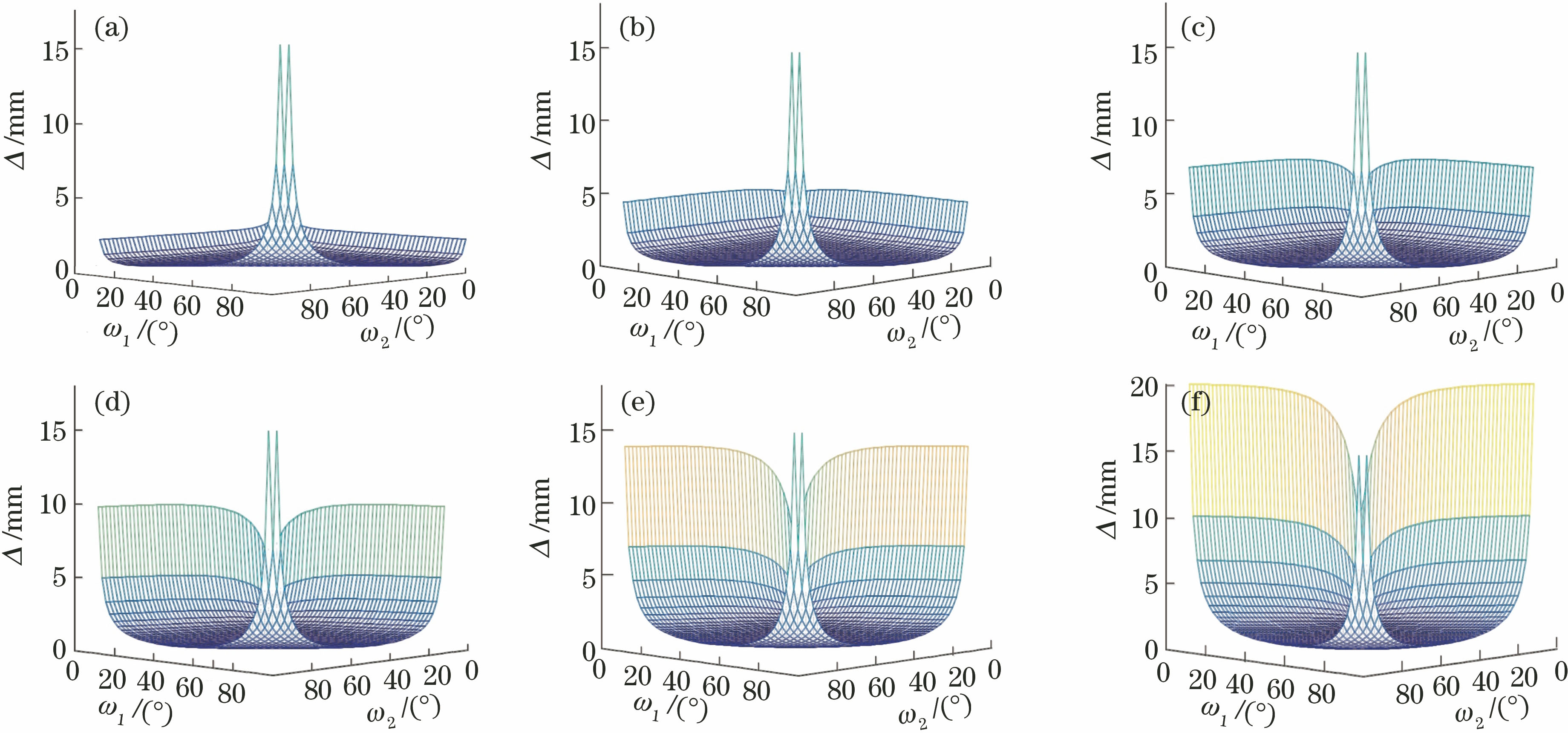
Fig. 2. Influence of horizontal projection angle on system accuracy. (a) β1=β2=10°; (b) β1=β2=20°; (c) β1=β2=30°; (d) β1=β2=40°; (e) β1=β2=50°; (f) β1=β2=60°
Fig. 3. Influence of angle between optical axis and baseline on system accuracy. (a) β1=β2=10°; (b) β1=β2=20°; (c) β1=β2=30°; (d) β1=β2=40°; (e) β1=β2=50°; (f) β1=β2=60°
Fig. 4. Curves of system accuracy varies with angle between optical axis and baseline
Fig. 5. System accuracy varies with baseline distance
Fig. 6. Effect of lens focal length and angle of field on system accuracy
Fig. 7. Experiment platform
Fig. 8. Experimental calibration plate
| ||||||||||||||||||||||||||||
Table 1. Experimental results with baseline distance B=300 mm
| ||||||||||||||||||||||||||||
Table 2. Experimental results with baseline distance B=350 mm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20