
Haidong Zhang, Yiming Xu, Li Wang, Chunlei Bian, Fangjie Zhou. Visual Odometry Based on Improved Dual-Stream Network Structure[J]. Laser & Optoelectronics Progress, 2021, 58(20): 2010006
- Laser & Optoelectronics Progress
- Vol. 58, Issue 20, 2010006 (2021)
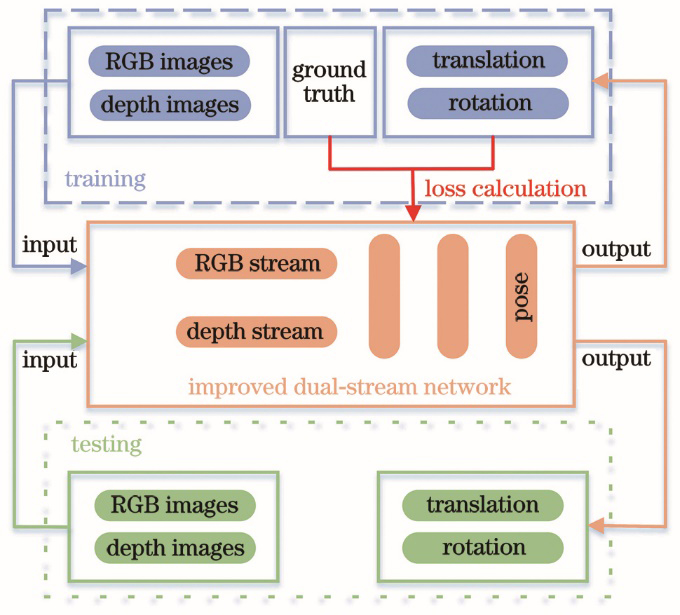
Fig. 1. System overall structure
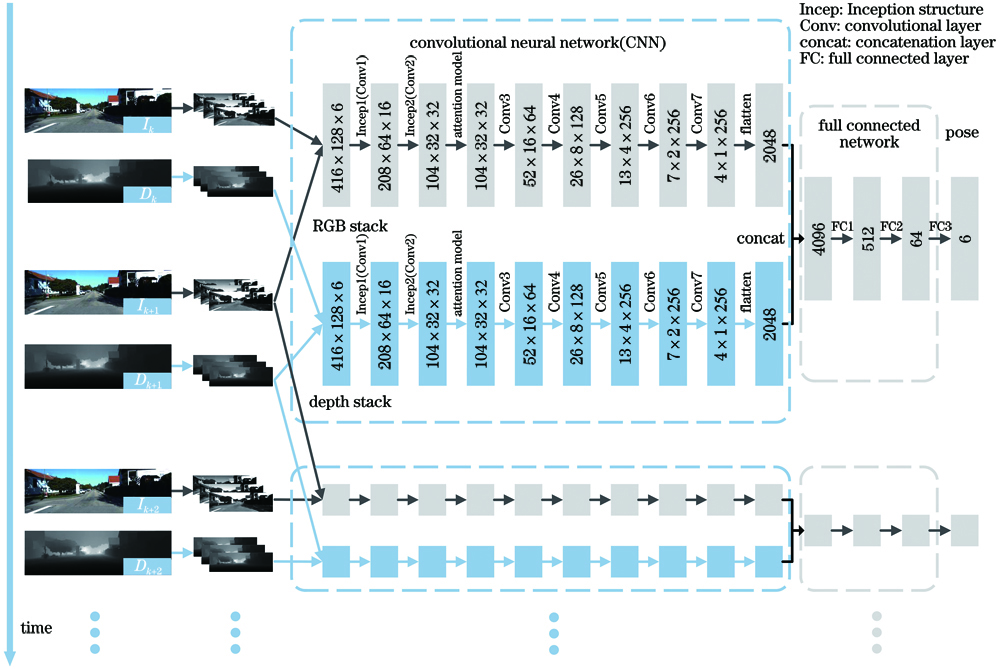
Fig. 2. Network framework
Fig. 3. Inception structure. (a) Incep1 structure; (b) Incep2 structure
Fig. 4. CBAM structure diagram
Fig. 5. Processed data set. (a) RGB image; (b) depth image
Fig. 6. Ground truth processing
Fig. 7. Diagram of partly sequence 00--10 trajectory
Fig. 8. Image acquisition platform
Fig. 9. Experimental scene and trajectory diagram
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Network layer parameters
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Test results of VISO-M, SfMLearner,VISO-S, and proposed method on the KITTI Visual Odometry data set

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20