
Xu Benyou, Zhang Xu, Yang Yingying. Research on Algorithm for Eliminating Bending of Lidar Point Cloud Image[J]. Laser & Optoelectronics Progress, 2021, 58(1): 114005
- Laser & Optoelectronics Progress
- Vol. 58, Issue 1, 114005 (2021)
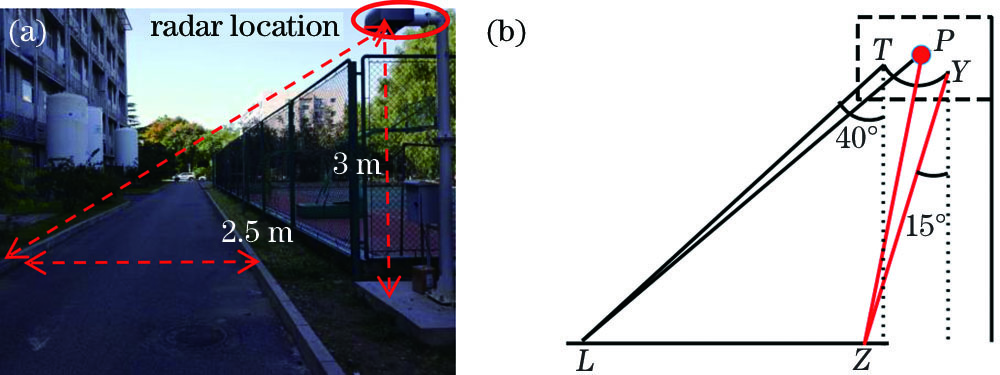
Fig. 1. Schematic of actual installation environment and scanning diagram of 3D radar. (a) Actual installation environment; (b) scanning diagram at any time
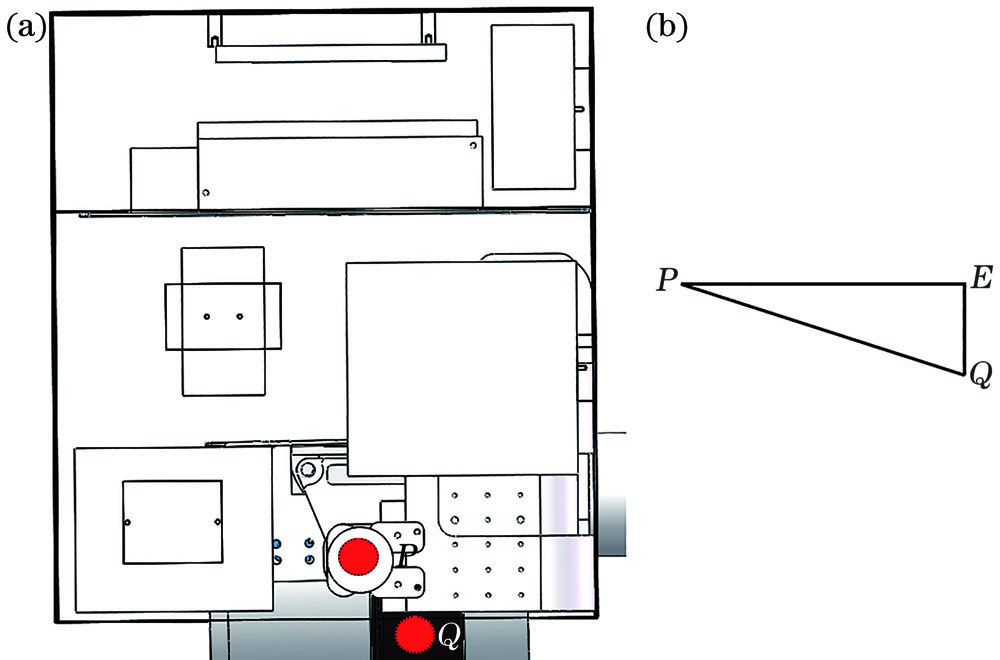
Fig. 2. Section view of 3D radar. (a) Section view; (b) coordinate center relation
Fig. 3. Calculation of ranging error
Fig. 4. Errors of each scan line of lidar
Fig. 5. Schematic of sag in point cloud image. (a) Longitudinal sag; (b) horizontal sag
Fig. 6. Schematic of 3D radar coordinate system transformation. (a) Diagram of cross section coordinate system; (b) coordinate transformation diagram
Fig. 7. Road environment. (a) Lateral view; (b) longitudinal view; (c) longitudinal section view
Fig. 8. Distance resolution. (a) Horizontal distance resolution; (b) longitudinal distance resolution; (c) partial longitudinal enlargement (D=1.8 m); (d) partial longitudinal enlargement (D=4.5 m); (e) partial horizontal enlargement (D=0); (f) partial horizontal enlargement (D=25 m)
Fig. 9. Pedestrian imaging. (a) Top view; (b) horizontal section view
Fig. 10. Imaging in complex environment. (a) Actual environment; (b) actual environment imaging; (c) horizontal section view (background exists); (d) horizontal section view (background disappears)
Fig. 11. Imaging experiment in snowing environment. (a) Actual environment; (b) point cloud image; (c) longitudinal section view
Fig. 12. Panorama imaging. (a) Panorama scenery; (b) panorama scenery

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20