
Xing Liu, Jian Chen, Dongfang Yang, Hao He. Scene-Coupled Intelligent Multi-Task Detection Algorithm for Air-to-Ground Remote Sensing Image[J]. Acta Optica Sinica, 2018, 38(12): 1215008
- Acta Optica Sinica
- Vol. 38, Issue 12, 1215008 (2018)
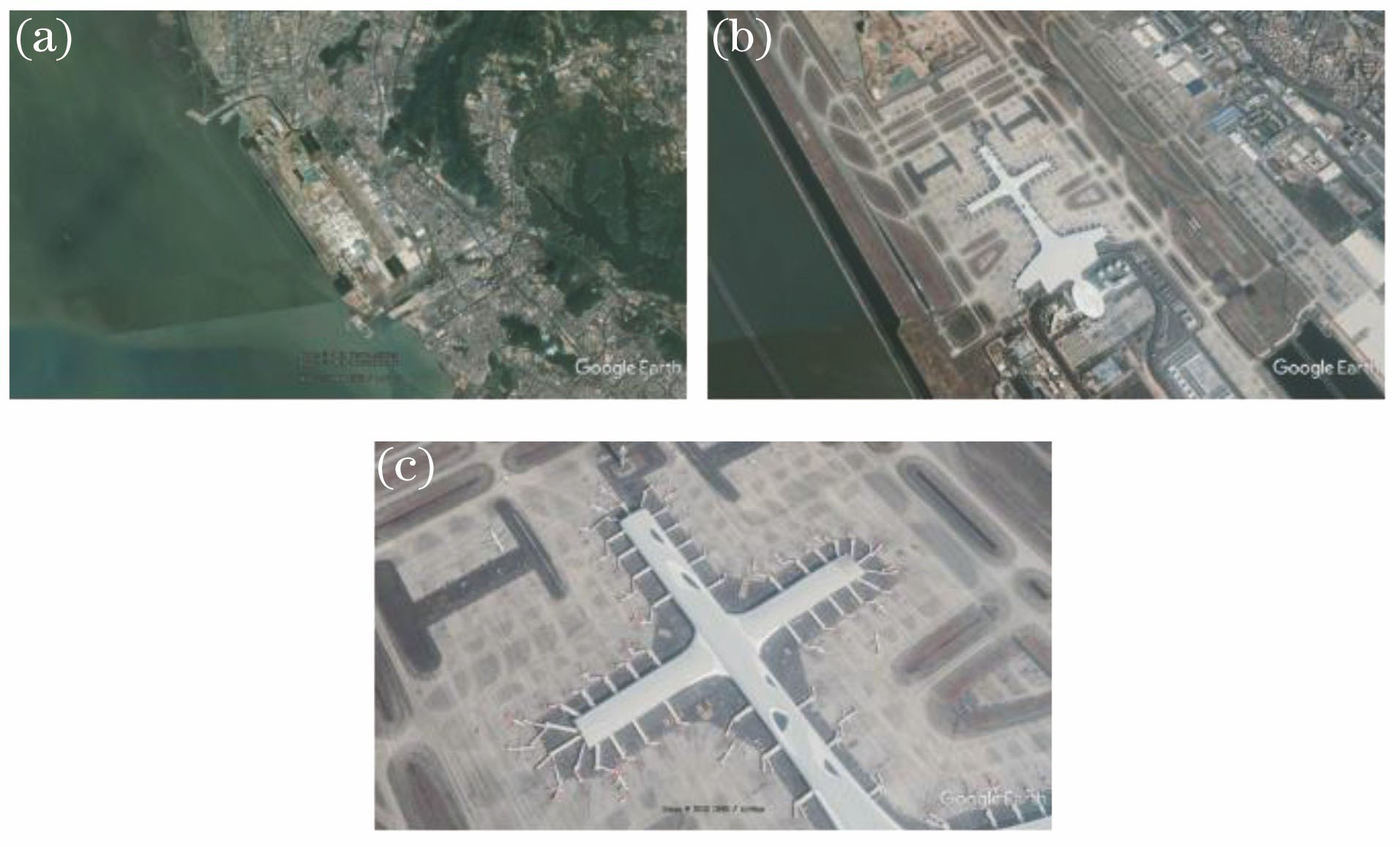
Fig. 1. Air-to-ground variable resolution scene. (a) High-altitude vision; (b) middle-altitude vision; (c) low-altitude vision
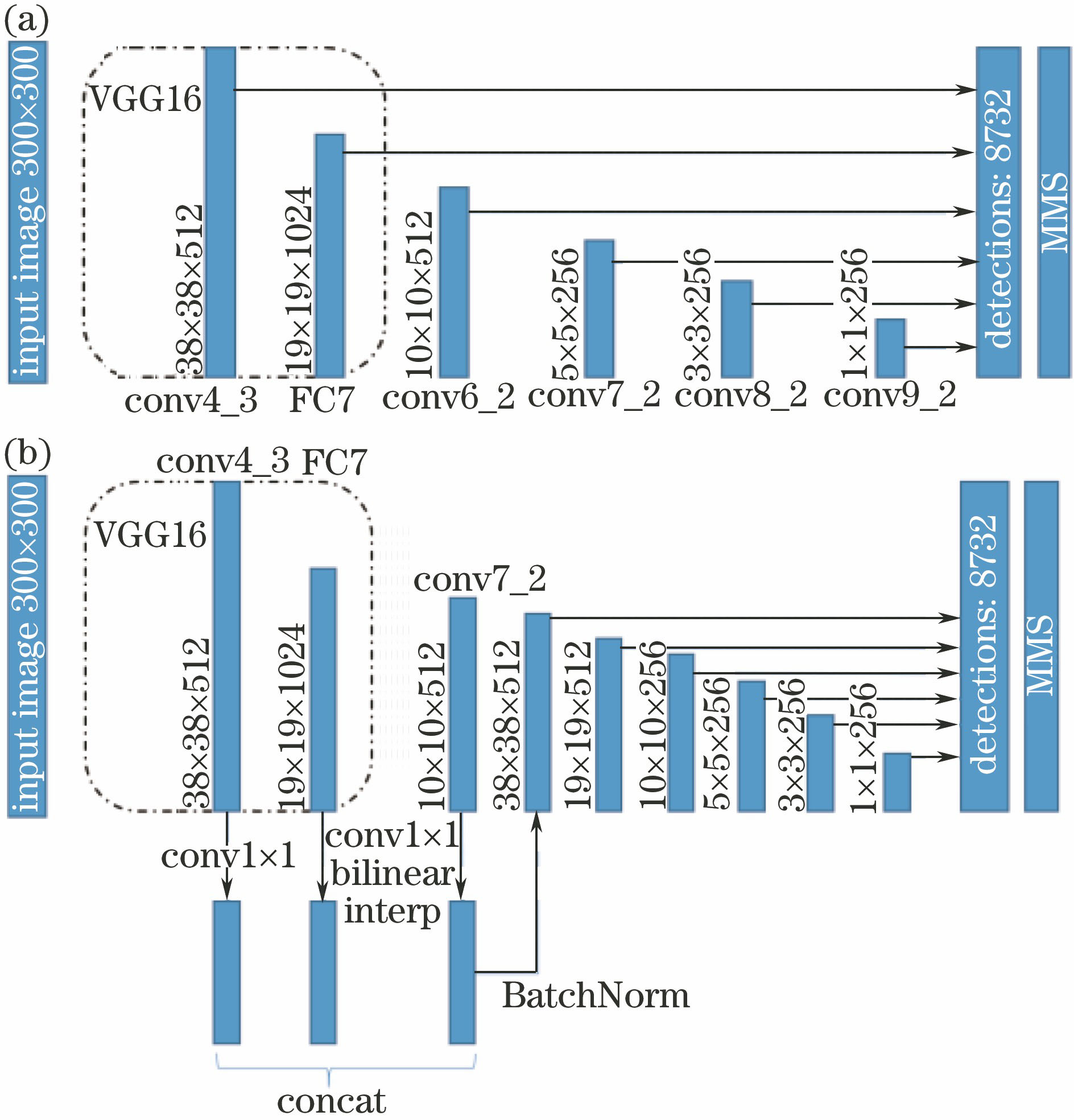
Fig. 2. Models. (a) SSD model; (b) FSSD model
Fig. 3. Scene-coupled multi-task object detection model
Fig. 4. Information activation module. (a) Synchronous activation; (b) asynchronous activation
Fig. 5. Scene-assisted multi-task datasets. (a) Scene- object datasets; (b) remote sensing scene datasets
Fig. 6. Visualization results of scene coupling multi-task model (VGG16) validation set
Fig. 7. Sequential scene change resolution target search. (a) Far view rasterization scene perception schematic; (b) high-altitude scene-aware guided object detection
|
Table 1. Two feature map channel fusion methods (synchronous activation, VGG16)
|
Table 2. Comparison of IA module on different framework models
|
Table 3. Effect of synchronous and asynchronous activations on accuracy of object detection
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4. Scene-coupled multi-task model detection results based on different feature extractions
| |||||||||||||||||||||||||||||
Table 5. Comparison of proposed algorithm with traditional object detection models %
| |||||||||||||||||||||||
Table 6. Classification results in remote sensing scenes under different feature extraction networks

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20