
Zhen Peng, Yuanjian Lü, Chao Qu, Dahu Zhu. Accurate Registration of 3D Point Clouds Based on Keypoint Extraction and Improved Iterative Closest Point Algorithm[J]. Laser & Optoelectronics Progress, 2020, 57(6): 061002
- Laser & Optoelectronics Progress
- Vol. 57, Issue 6, 061002 (2020)
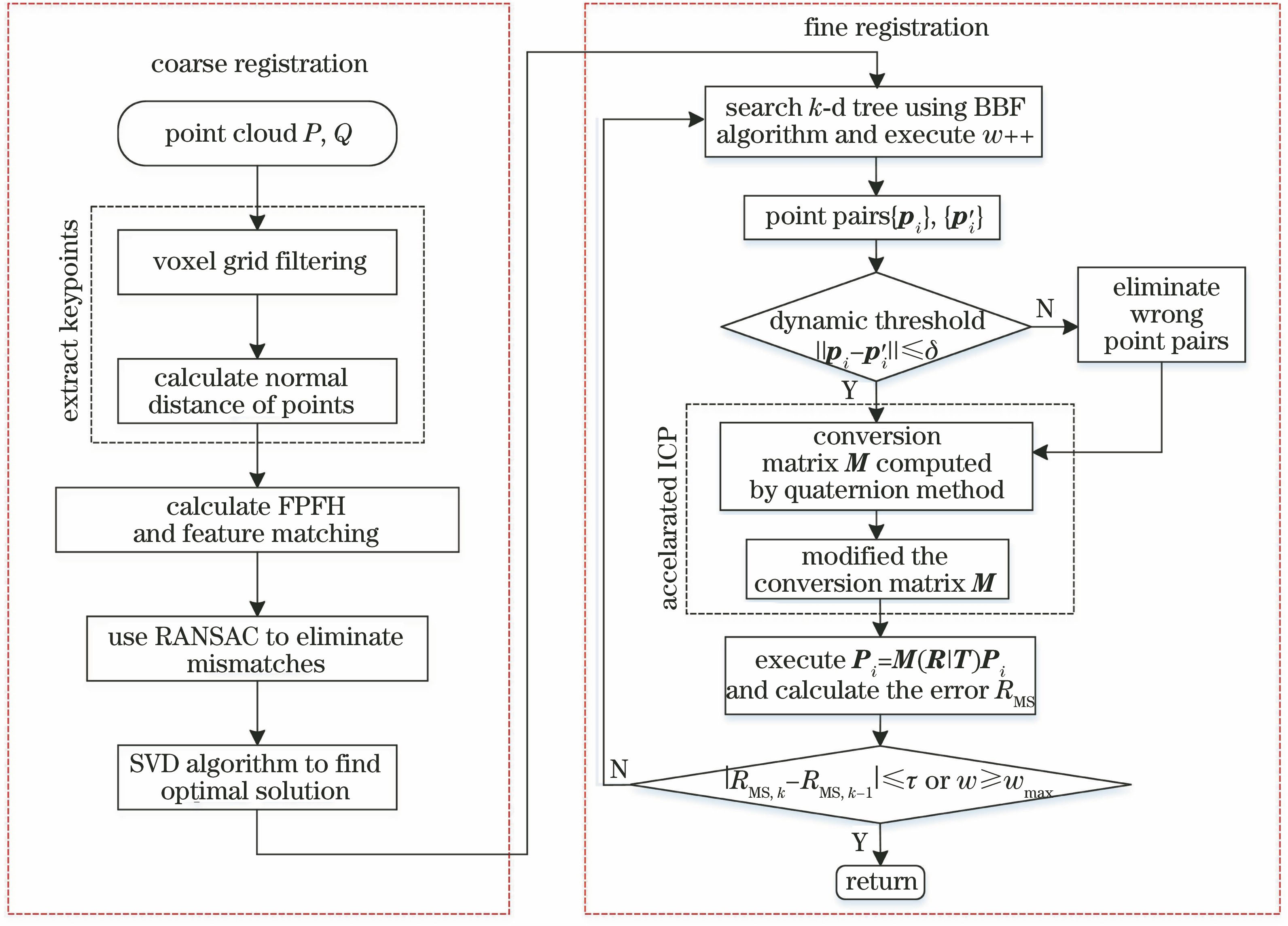
Fig. 1. Flowchart of registration of point clouds P and Q
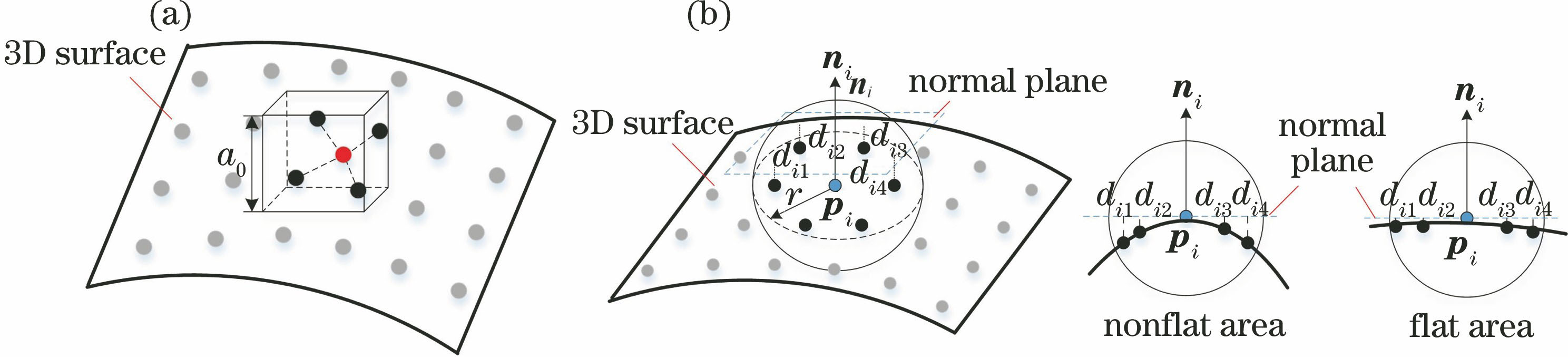
Fig. 2. Keypoint extraction. (a)Voxel grid filtering; (b) extracting keypoints using normal distance
Fig. 3. Distribution of keypoints under different parameters. (a) a0=0.3 mm, r=1.0 mm, thr=10%, m=5, the number of keypoints is 658; (b) a0=0.4 mm, r=2.0 mm, thr=10%, m=5, the number of keypoints is 597; (c) a0=0.4 mm, r=2.0 mm, thr=10%, m=10, the number of keypoints is 364
Fig. 4. Different nearest point models. (a) “Point to point” model; (b) “point to triangle plane” model
Fig. 5. Coarse registration of model point clouds. (a) Feature matching; (b) correct correspondences after improved RANSAC; (c) results of coarse registration
Fig. 6. Coarse registration of building point clouds. (a) Feature matching; (b) correct correspondences after improved RANSAC; (c) results of coarse registration
Fig. 7. Fine registration of model point clouds. (a) Results of fine registration by proposed method; (b) chromatographic comparison of point clouds distance deviation under fine registration; (c) registration error comparison of fine registration among different methods
Fig. 8. Fine registration of building point clouds. (a) Results of fine registration by proposed method; (b) chromatographic comparison of point clouds distance deviation under fine registration; (c) registration error comparison of fine registration among different methods
Fig. 9. Registration experiment comparison of Gaussian noise point clouds under different methods. (a) Bunny; (b) happy; (c) armadillo
Fig. 10. Registration results of different point clouds with Gaussian noise σ=0.02 in proposed method. (a) Bunny; (b) happy; (c) armadillo
|
Table 1. Coarse registration results of model point clouds
| ||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Comparison of coarse registration results of model point clouds by different methods
|
Table 3. Coarse registration results of building point clouds
| ||||||||||||||||||||||||||||||||||
Table 4. Comparison of coarse registration results of building point clouds by different methods
| ||||||||||||||||||||||||||||||||||||||||||||||||
Table 5. Comparison of fine registration results of model point clouds under different methods
| ||||||||||||||||||||||||||||||||||
Table 6. Comparison of fine registration results of building point clouds by different methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20