
Xiufeng Liao, Zhiqiang Hou, Wangsheng Yu, Jiaoyao Wang, Chuanhua Chen. A Scale Adapted Tracking Algorithm Based on Kernelized Correlation[J]. Acta Optica Sinica, 2018, 38(7): 0715002
- Acta Optica Sinica
- Vol. 38, Issue 7, 0715002 (2018)
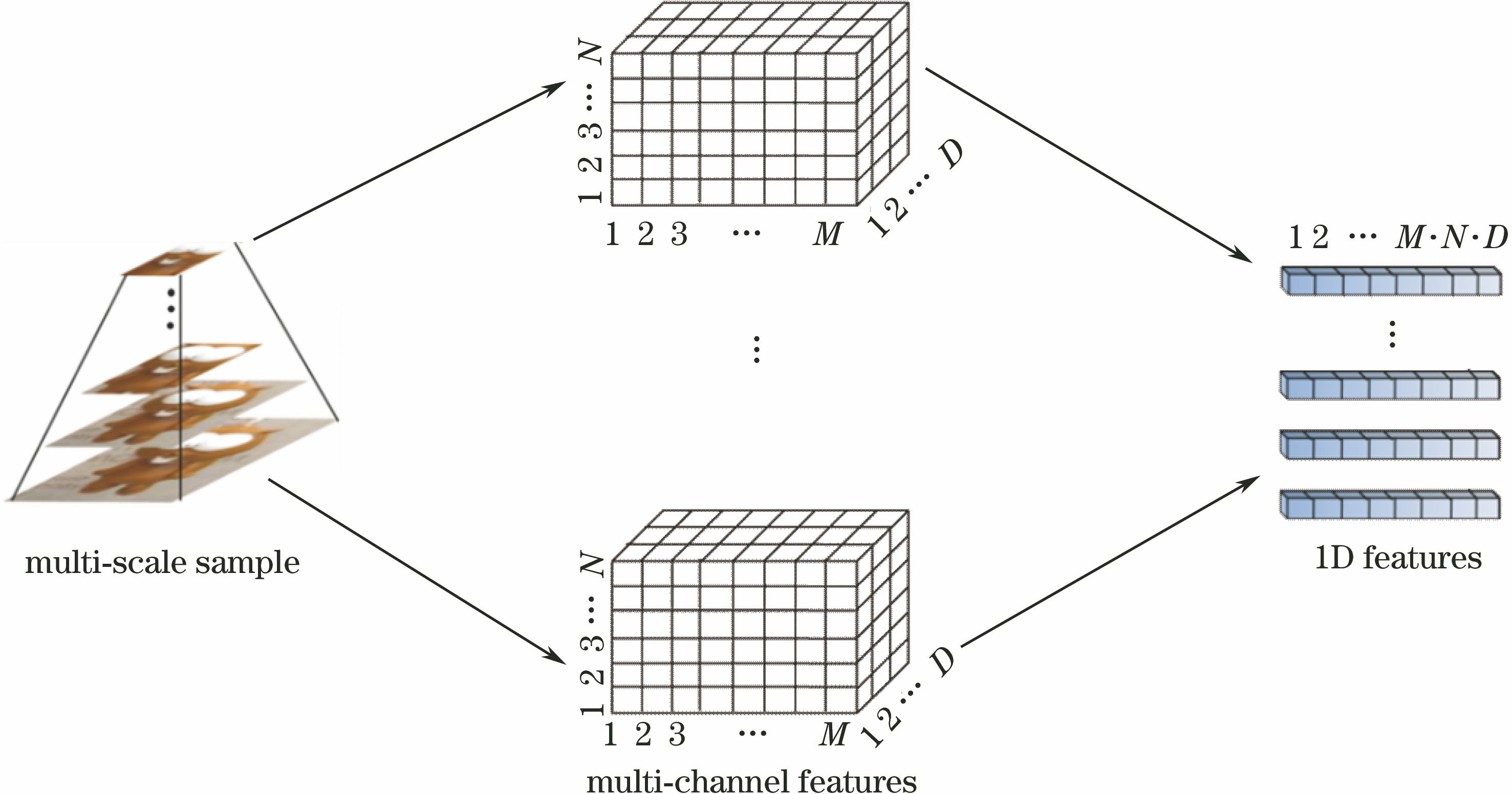
Fig. 1. Extraction process of one-dimensional features

Fig. 2. Flow chart of proposed tracking method
Fig. 3. Qualitative comparison of tracking results of 9 trackers
Fig. 4. (a) Precision plots and (b) success plots of 28 sequences with scale variations
Fig. 5. (a) Precision plots and (b) success plots of 51 sequences
| ||||||||||||||||||||||||||||||
Table 1. Scale adapted tracking algorithm based on kernelized correlation
|
Table 2. Center location errors and overlap rates of 12 sequences
|
Table 3. Tracking precision values on 11 different attributes
|
Table 4. Tracking success rates on 11 attributes
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 5. Tracking speed comparison of 9 trackers

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20