
Xiaosong Shi, Yinglei Cheng, Doudou Xue, Xianxiang Qin. Object Classification Method for Multi-Source Fusion Point Clouds Based on Point-Net[J]. Laser & Optoelectronics Progress, 2020, 57(8): 081019
- Laser & Optoelectronics Progress
- Vol. 57, Issue 8, 081019 (2020)
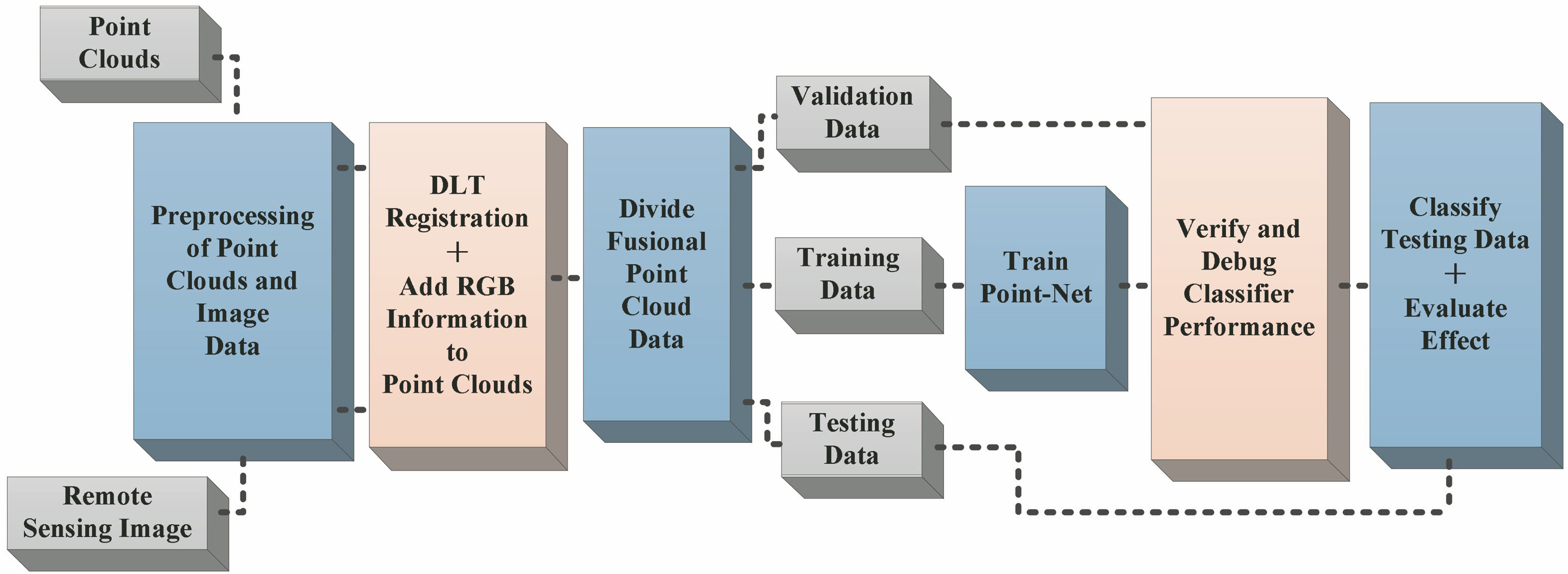
Fig. 1. Flow chart of proposed method
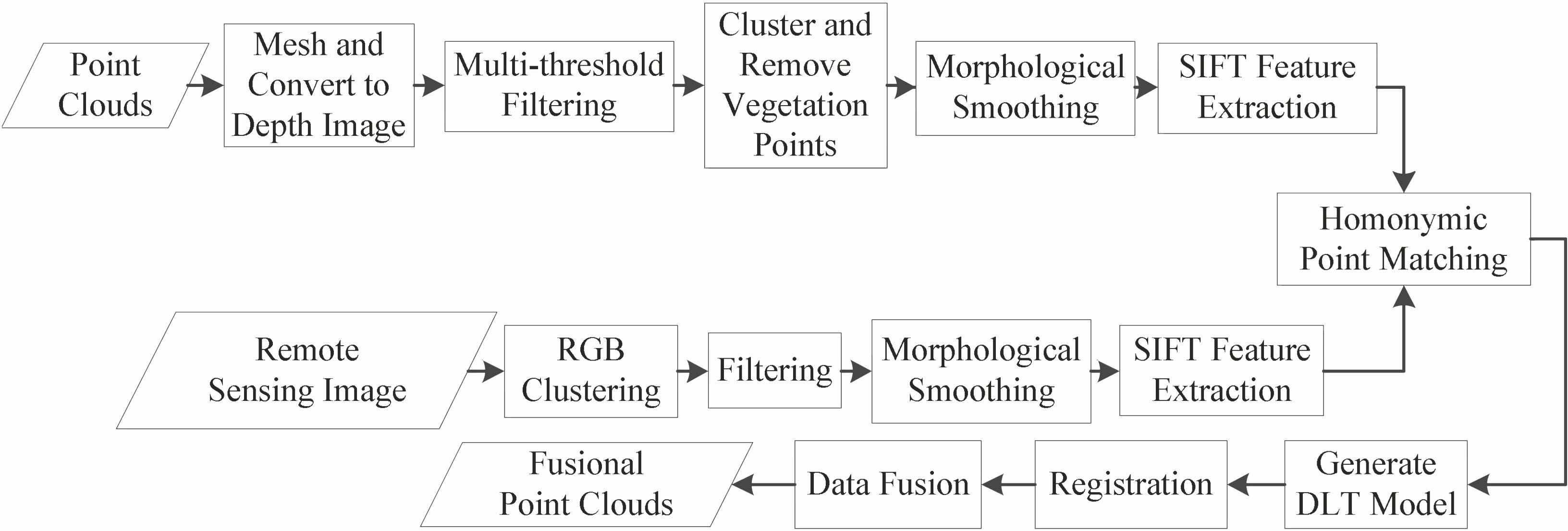
Fig. 2. Process of registration and fusion
Fig. 3. Architecture of Point-Net
Fig. 4. Architecture of multi-scale Point-Net
Fig. 5. Simulation data. (a) Point cloud data; (b) remote-sensing image data; (c) overlapping image
Fig. 6. Binary images of point clouds and remote-sensing image, results of registration, and fusion point clouds. (a) Binary image of point clouds; (b) binary image of remote-sensing image; (c) registration result; (d) fusion point cloud data
Fig. 7. Training error curve
Fig. 8. Classification results. (a)(b) Without RGB point clouds; (c)(d) with RGB point clouds
|
Table 1. Classification accuracy of different methods
|
Table 2. Classification time of different methodss

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20