
Wenwei Yan, Shuai Chen, Baoyan Mu, Liang Gao. Fringe Segmentation Algorithm Based on Improved U-Net[J]. Laser & Optoelectronics Progress, 2022, 59(12): 1215010
- Laser & Optoelectronics Progress
- Vol. 59, Issue 12, 1215010 (2022)
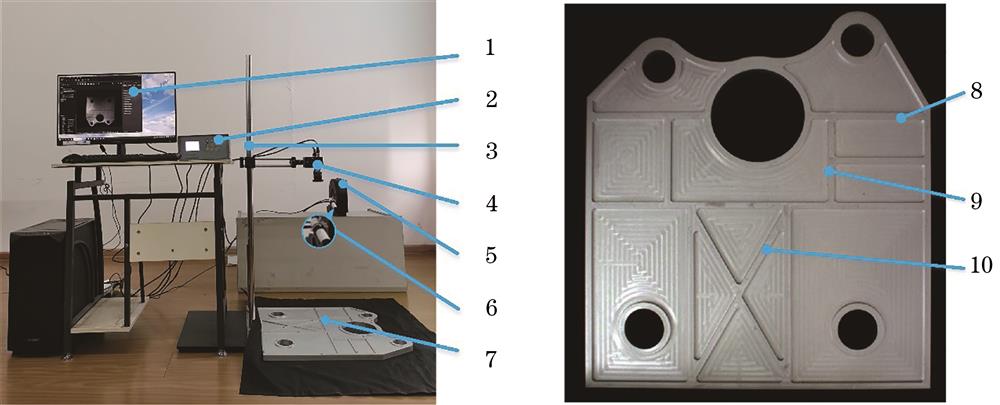
Fig. 1. Image acquisition system
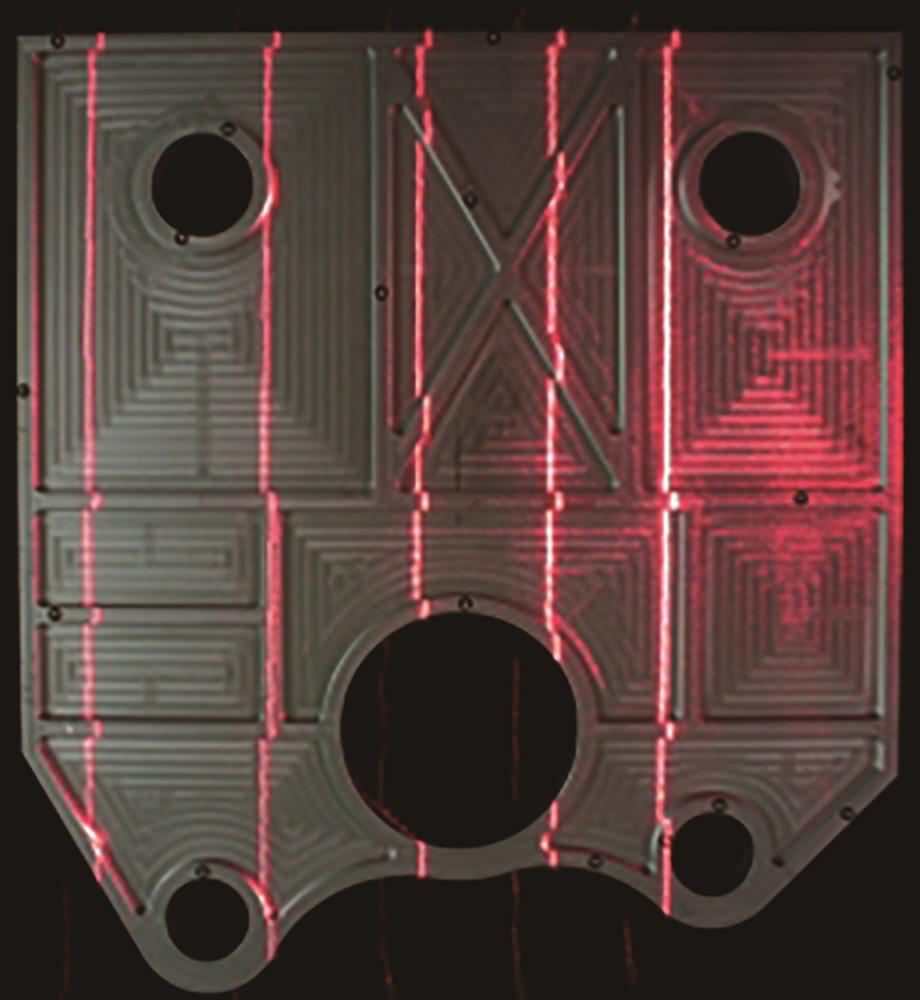
Fig. 2. Captured image
Fig. 3. Marked map
Fig. 4. Flow chart of image segmentation
Fig. 5. U-Net network
Fig. 6. Coordinate attention mechanism
Fig. 7. Pyramid pooling module
Fig. 8. VGG16 network
Fig. 9. Improved U-Net network
Fig. 10. Training loss value and accuracy value
Fig. 11. Validation loss value and accuracy value
Fig. 12. Segmentation results of different algorithms
Fig. 13. Fringe segmentation of improved U-Net algorithm in complex scene. (a) Original image; (b) ground true; (c) segmentation result of improved U-Net algorithm
Fig. 14. Extraction of light stripe feature points corresponding to stiffeners in different directions. (a) Feature point extraction of horizontal stiffener stripes; (b) feature point extraction of inclined stiffener stripes; (c) feature point extraction of vertical stiffener stripes
Fig. 15. Metal workpiece
|
Table 1. Index values of different algorithms
|
Table 2. Measurement results of stiffeners in different directions of metal workpiece
|
Table 3. Repeatability measurement of stiffener at position a of metal workpiece

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20