
Chong Zhang, Yingping Huang, Zhiyang Guo, Jingyi Yang. Real-time lane detection method based on semantic segmentation[J]. Opto-Electronic Engineering, 2022, 49(5): 210378
- Opto-Electronic Engineering
- Vol. 49, Issue 5, 210378 (2022)
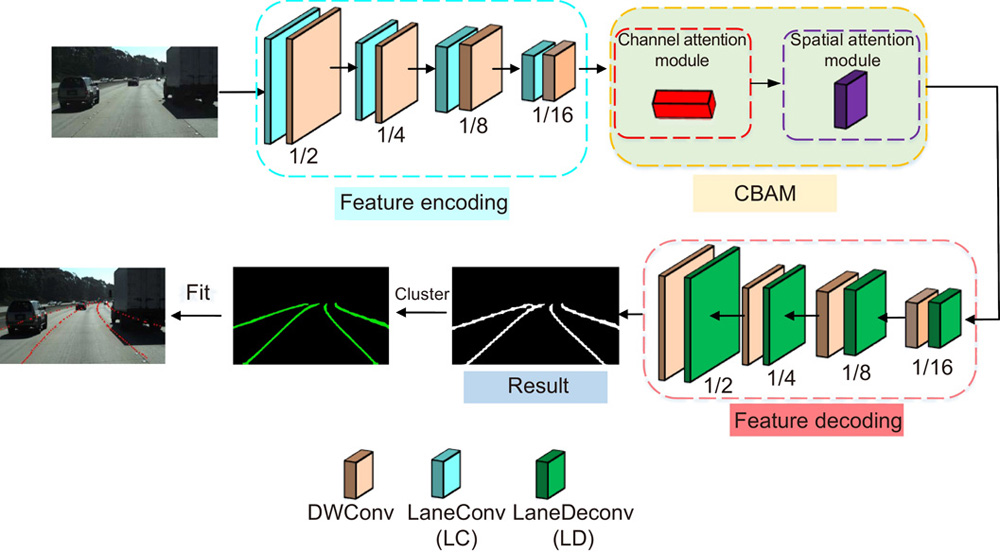
Fig. 1. Framework of the method
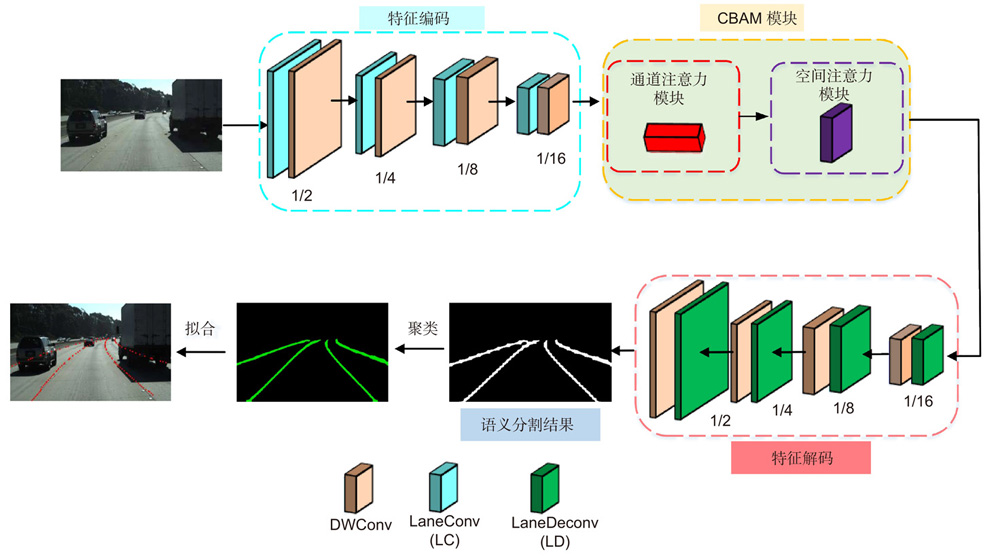
Fig. 1. Framework of the method
Fig. 2. The parameters of the network and illustration of LaneConv and LaneDeconv
Fig. 3. Depth separable convolution. (a) Channel by channel convolution; (b) Pointwise convolution
Fig. 4. (a) Laneconv structure; (b) Lanedeconv structure
Fig. 5. (a) Channel attention; (b) Spatial attention
Fig. 6. DBSCAN cluster
Fig. 7. The output in different stages. (a) Binary output; (b) Clustering output; (c) Fitting output
Fig. 8. Comparison between visualization results of baseline and our method on TuSimple. (a) Original scene; (b) True value; (c) Lanenet results; (d) Results of our method
Fig. 9. Comparison of effects before and after adding CBAM. (a) Not joined CBAM; (b) Joined CBAM
Fig. 10. Visual results generated by our method on some of typical scenarios
|
Table 1. Comparison of parameters and computations
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Comparison results with other methods on tusimple dataset

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20