
Ligen Shi, Jun Qiu, Chang Liu, Xiaojuan Deng. Disparity Reconstruction Algorithm Based on YCbCr Light Field Data[J]. Laser & Optoelectronics Progress, 2022, 59(2): 0211002
- Laser & Optoelectronics Progress
- Vol. 59, Issue 2, 0211002 (2022)
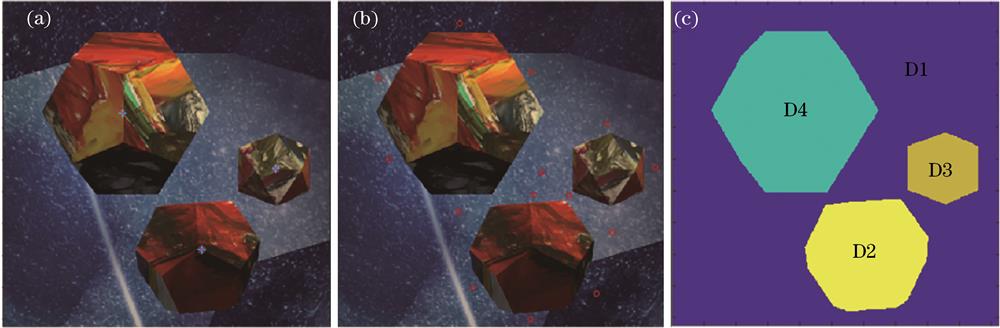
Fig. 1. Monomer data. (a) Selection of seed points; (b) selection of background points; (c) results of monomer data
![Results of disparity reconstruction in different channels of Papillon and Mona scenes. (a) RGB[31]; (b) Y channel; (c) R channel; (d) G channel; (e) B channel](/richHtml/lop/2022/59/2/0211002/img_2.jpg)
Fig. 2. Results of disparity reconstruction in different channels of Papillon and Mona scenes. (a) RGB[31]; (b) Y channel; (c) R channel; (d) G channel; (e) B channel
Fig. 3. Schematic diagram of matching window selection
Fig. 4. Preset viewpoint combination
Fig. 5. Selection of matching window direction
Fig. 6. Edge extension of monomer data
Fig. 7. Disparity reconstruction results of synthetic data. (a) Center view image[31,34]; (b) monomer map; (c) initial disparity map; (d) optimized disparity map
Fig. 8. Disparity estimation result of real data. (a) Center view image; (b) monomer map; (c) disparity map
Fig. 9. Analysis of Platonic scene. (a) Real disparity map; (b) initial disparity map; (c) optimized disparity map
Fig. 10. Disparity curves in the horizontal direction. (a) 100th line; (b) 230th line; (c) 430th line
Fig. 11. Evaluation of occlusion of real data. (a) Center view image; (b) disparity map; (c) fitting diagram of disparity curve to boundary point
Fig. 12. Reconstruction results by different algorithms, data of Figs. 12(b)‒(f) is from Ref.[34]. (a) Proposed algorithm; (b) LF; (c) LF_OCC; (d) MV; (e) mvcmv0; (f) epi1
Fig. 13. Enlarged images of reconstruction results of Backgammon scene obtained by different algorithms. (a) Proposed algorithm; (b) LF; (c) LF_OCC; (d) MV; (e) mvcmv0; (f) epi1
Fig. 14. Radar chart of evaluation scenes

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20