
Haoyu Li, Yunjie Yang, Hao Yang, Yu Fang. Three-Dimensional Circular Hole Recognition Algorithm Based on Point Cloud Normal and Projection Fusion[J]. Laser & Optoelectronics Progress, 2022, 59(8): 0820002
- Laser & Optoelectronics Progress
- Vol. 59, Issue 8, 0820002 (2022)
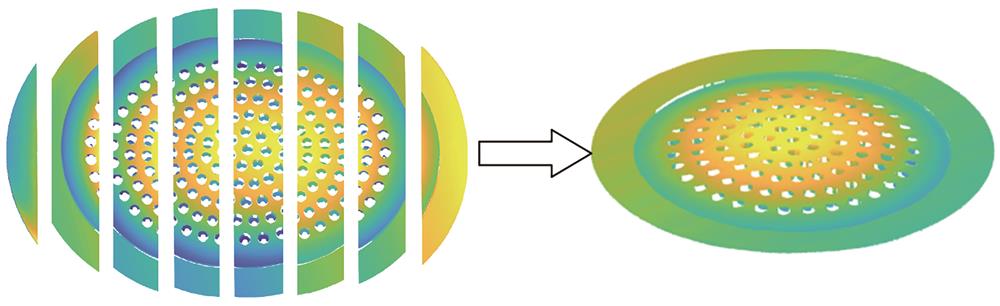
Fig. 1. Establishment of grid component point cloud model
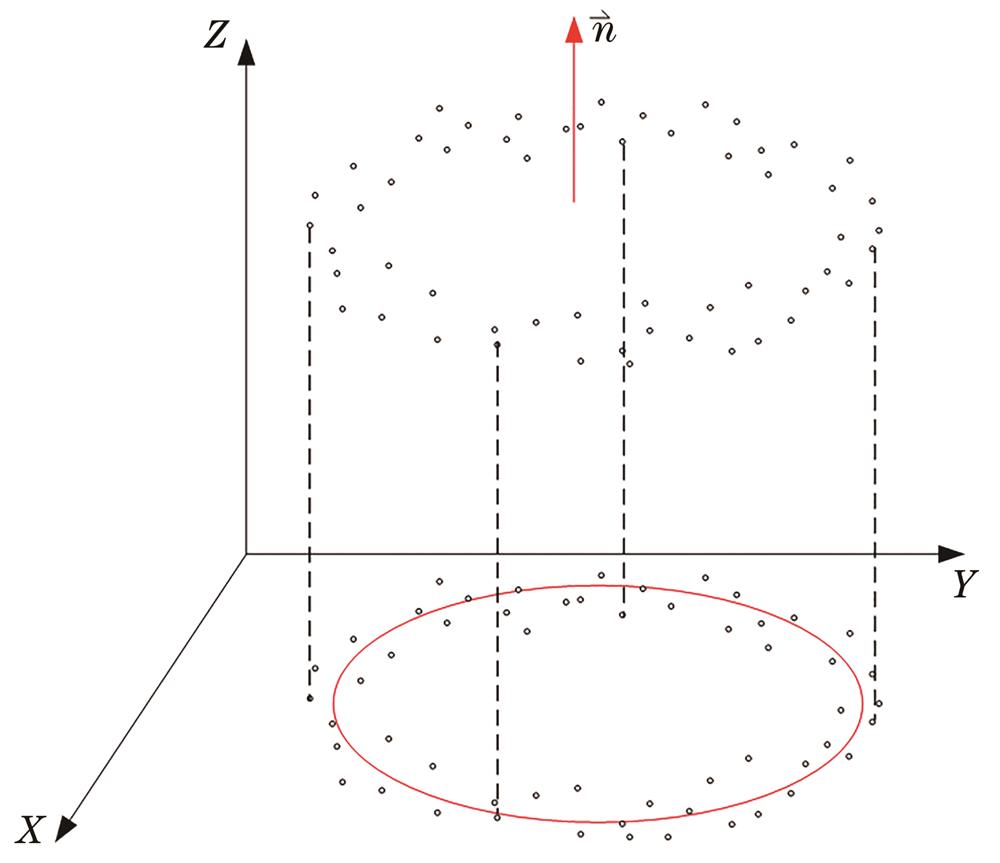
Fig. 2. Schematic diagram of algorithm
Fig. 3. 3D point cloud scanning detection system
Fig. 4. Edge extraction of grid hole. (a) Before edge extraction; (b) after edge extraction
Fig. 5. Comparison between RANSAC and the proposed algorithm. (a) Scattered edge points based on RANSAC algorithm; (b) scattered edge points based on proposed algorithm; (c) circular fitting effect based on RANSAC algorithm; (d) circular fitting effect based on proposed algorithm; (e) display of the circle center extracted based on RANSAC algorithm in two-dimensional space; (f) display of the circle center extracted based on proposed algorithm in two-dimensional space; (g) display of circle center extracted based on RANSAC algorithm in three-dimensional space; (h) display of circle center extracted based on RANSAC algorithm in three-dimensional space
|
Table 1. Line laser fixing parameters
|
Table 2. Parameters of mobile slide

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20