
Xiaoxiao Liu, Xueliang Ping, Xinyu Wang. C-FAST Feature Detection and Matching Algorithm Based on Image Color Information[J]. Laser & Optoelectronics Progress, 2019, 56(5): 051006
- Laser & Optoelectronics Progress
- Vol. 56, Issue 5, 051006 (2019)
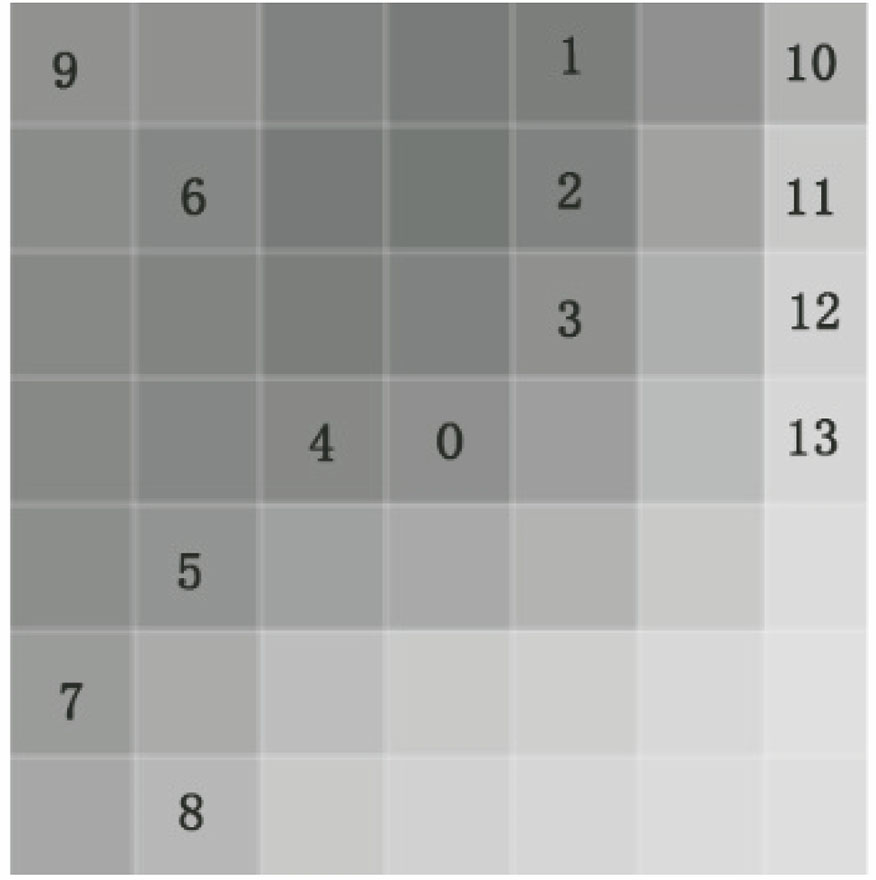
Fig. 1. Schematic of neighborhood scatter

Fig. 2. Distribution of feature point via different algrithms. (a) ALOI picture group; (b) FAST; (c) C-FAST
Fig. 3. Images from Mikolajczyk
Fig. 4. Results of feature matching. (a) C-FAST++, --; (b) FAST++, --; (c) CSIFT++, --; (d) SURF++, --(+ represents clockwise rotation or scale magnification, - represents counterclockwise rotation and scale reduction.)
Fig. 5. Light intensity picture group
Fig. 6. Comparison of illumination invariance
Fig. 7. Noise performance analysis. C-FAST algorithm in (a) impulse noise environment and (b) Gaussian noise environment; FAST algorithm in (c) impulse noise environment and (d) Gaussian noise environment; CSIFT algorithm in (e) impulse noise environment and (f) Gaussian noise environment; SURF algorithm in (g) impulse noise environment and (h) Gaussian noise environment
Fig. 8. Operation results in the natural light environment. (a) C-FAST; (b) FAST; (c) CSIFT; (d) SURF
Fig. 9. Algorithm matching logarithm
Fig. 10. Average time consuming of procedure
| |||||||||||||||||||||||||||||||||||||||||
Table 1. Parameter comparison of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20