
Dong Shen, Yuhang Xu, Qiang Li, Jing Di, Xia Huang. Research on Laser SLAM Algorithm Based on Sparse Pose Optimization[J]. Laser & Optoelectronics Progress, 2021, 58(24): 2428003
- Laser & Optoelectronics Progress
- Vol. 58, Issue 24, 2428003 (2021)
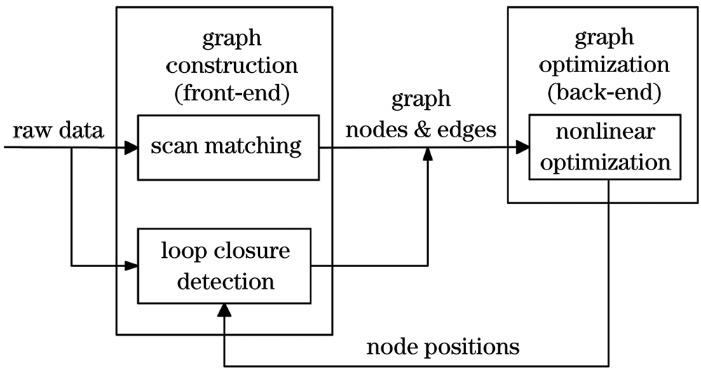
Fig. 1. Graph-based SLAM framework

Fig. 2. Compressed column storage format
Fig. 3. Flow chart of sparse matrix establishment
Fig. 4. Continuable LM algorithm
Fig. 5. Overall hardware structure diagram of the system
Fig. 6. The main parts and physical maps of the mobile robot
Fig. 7. Experimental results of the three algorithms for constructing map. (a) Gmapping; (b) Hector; (c) proposed algorithm
Fig. 8. Error curves of the three algorithms in corridor
Fig. 9. Error curves of the three algorithms in complex laboratory
|
Table 1. Error analysis of the three algorithms in the corridor environment
|
Table 2. Error analysis of the three algorithms in complex laboratory environment
|
Table 3. CPU load of the three algorithms
|
Table 4. Running time of the three algorithms unit: s

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20