
Xin Jian, Quan Zhou, Tianlong Yang. Research on key technologies of intelligent control system of bucket wheel machine in enclosed stockyard[J]. Infrared and Laser Engineering, 2021, 50(S2): 20200099
- Infrared and Laser Engineering
- Vol. 50, Issue S2, 20200099 (2021)
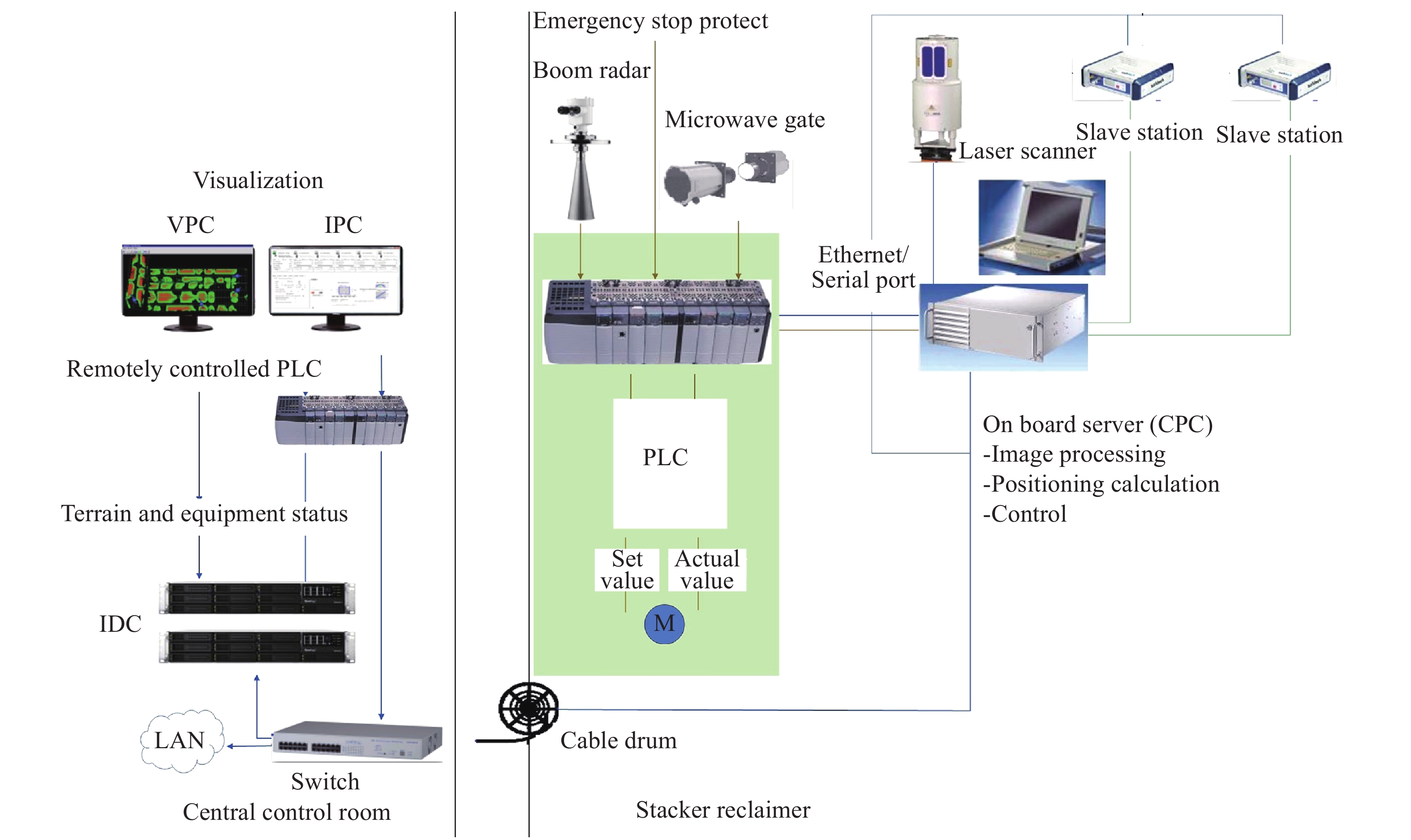
Fig. 1. System architecture diagram
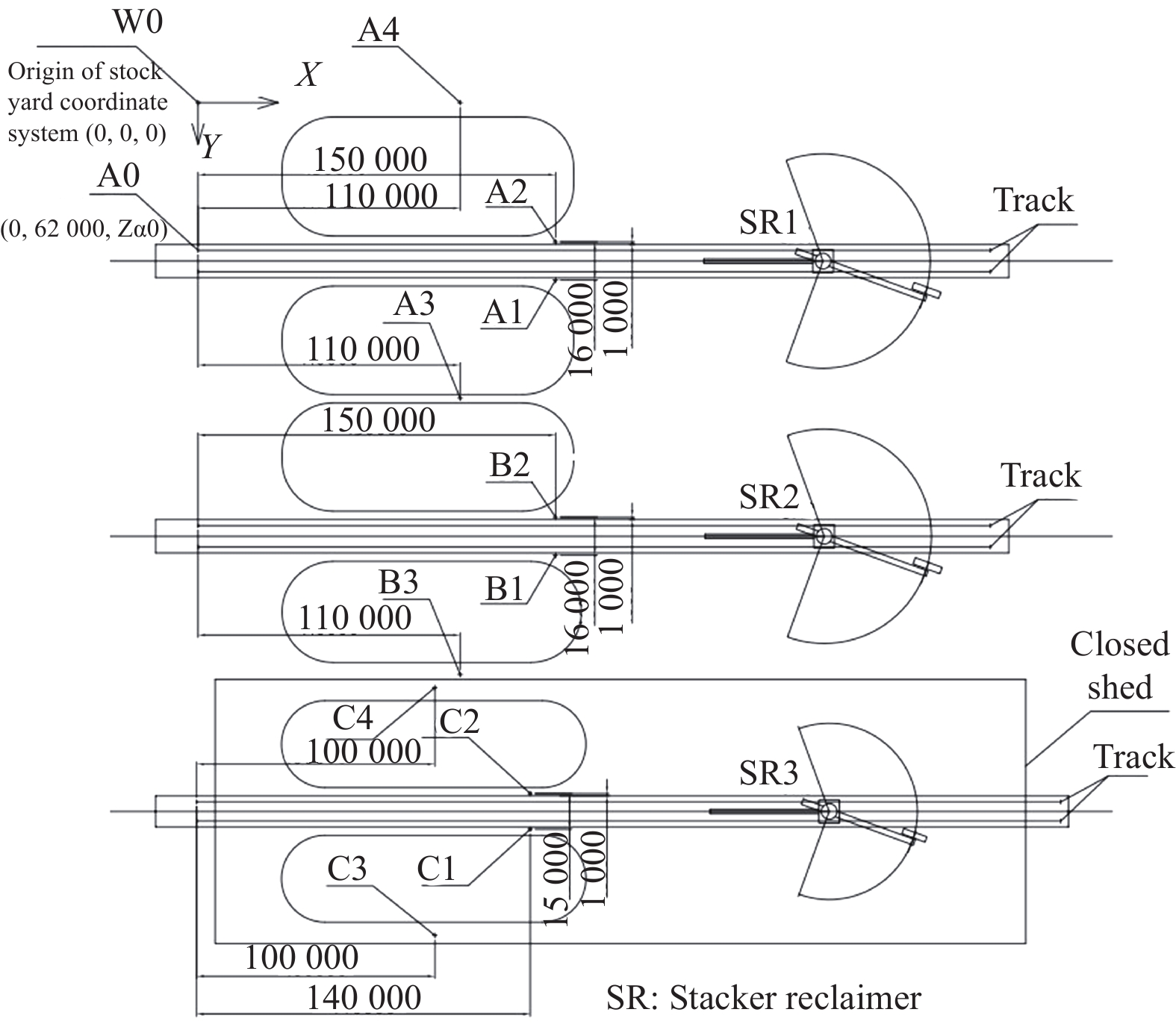
Fig. 2. Global coordinate system layout
Fig. 3. Establishment of each coordinate system
Fig. 4. Feature point extraction of sphere surface
Fig. 5. Back-calculation error of standard sphere
Fig. 6. Effect diagram of data mosaic
Fig. 7. Path planning
Fig. 8. Field test
|
Table 1. The calculation of spherical center coordinates
|
Table 2. Global coordinate value of calibrated sphere
|
Table 3. Calibration results

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20