
Bin Lin, Ying Li. High-Speed Correlation Filter Tracking Algorithm Based on High-Confidence Updating Strategy[J]. Acta Optica Sinica, 2019, 39(4): 0415003
- Acta Optica Sinica
- Vol. 39, Issue 4, 0415003 (2019)
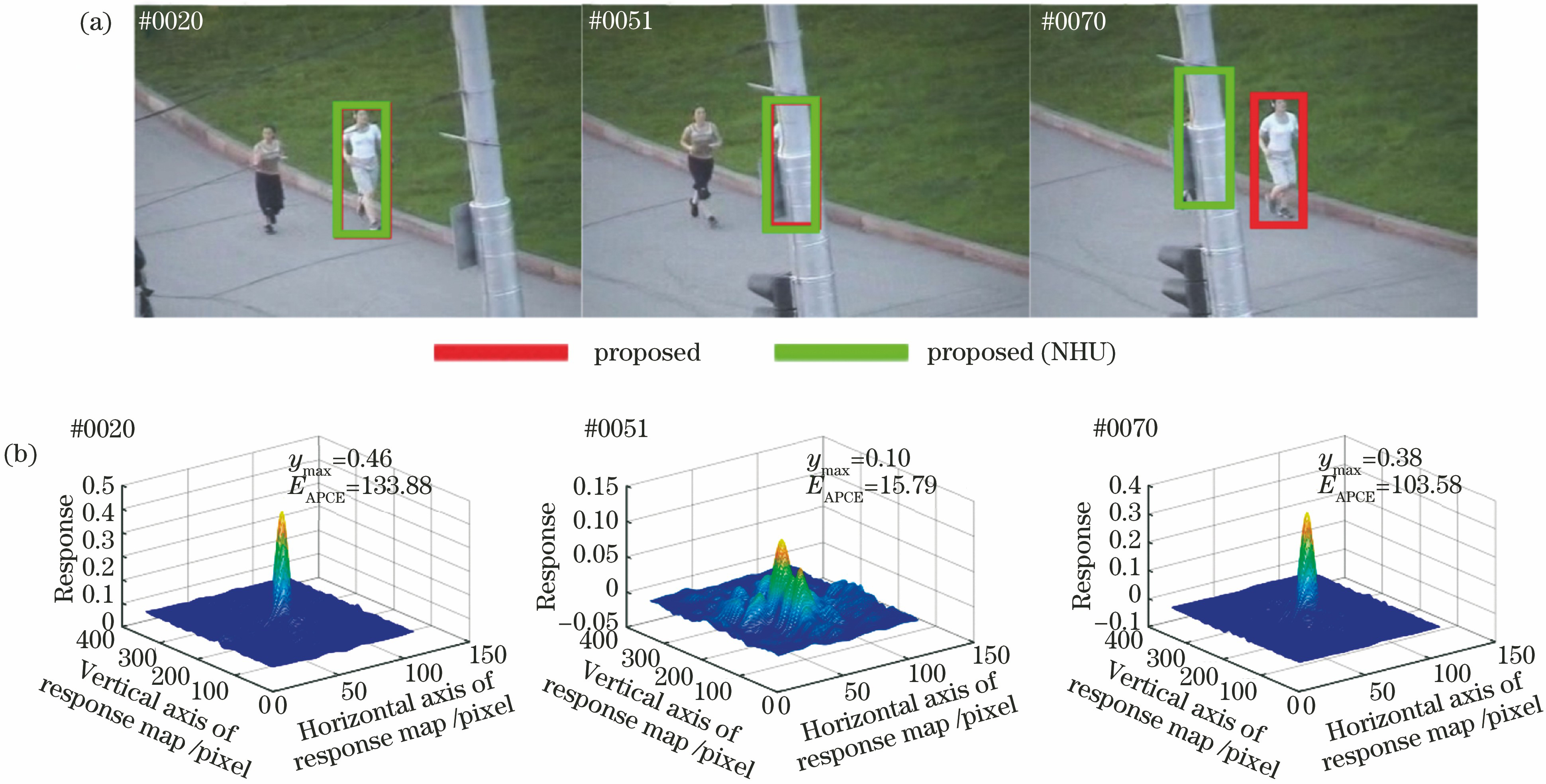
Fig. 1. Tracking results and response maps corresponding to proposed algorithm on Jogging-2 sequence. (a) Tracking results; (b) response maps
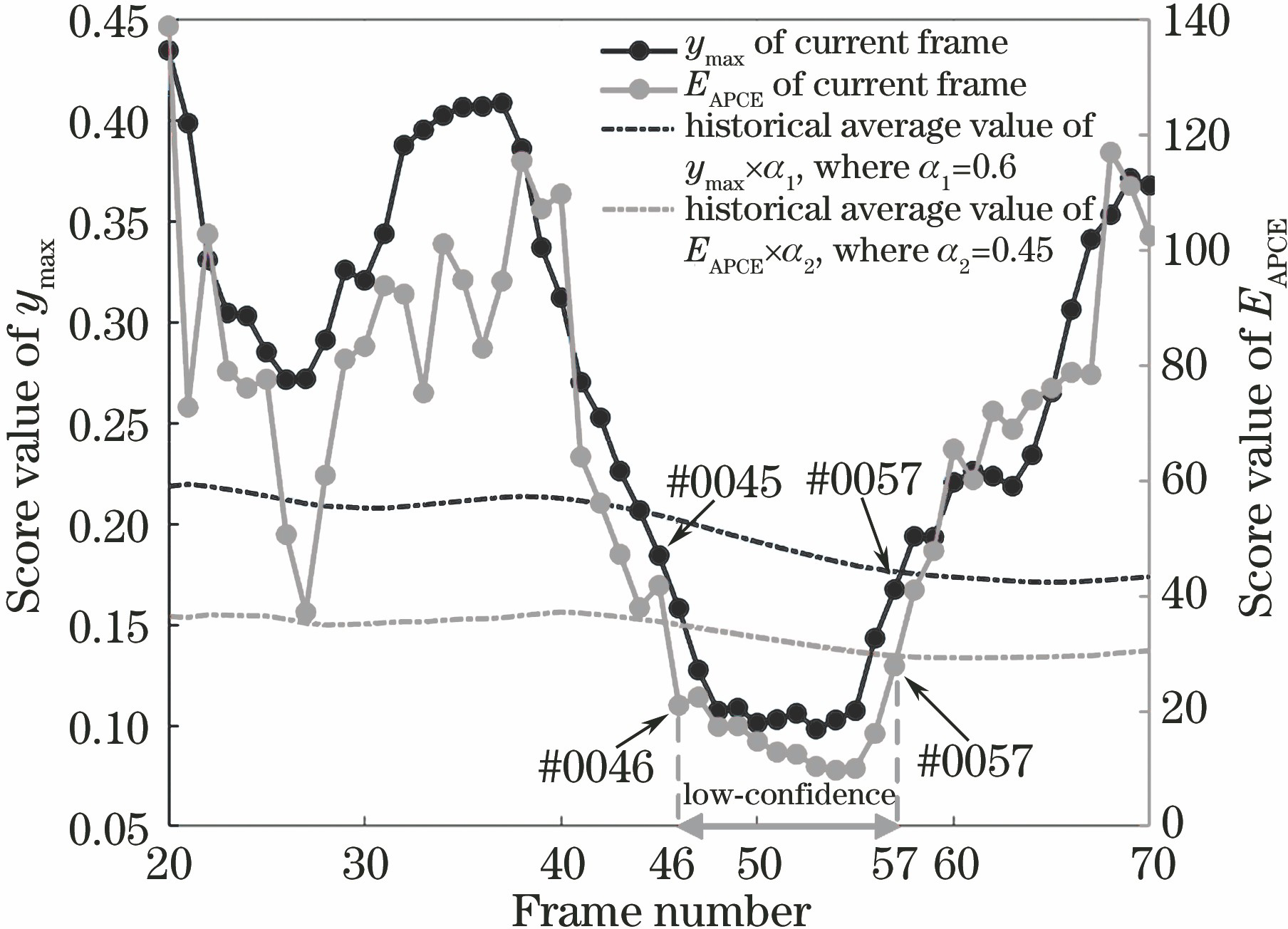
Fig. 2. Specific embodiment of high-confidence updating strategy in tracking process on Jogging-2 sequence
Fig. 3. Flowchart of proposed algorithm
Fig. 4. Tracking results of proposed algorithm with different parameter settings. (a) Precision plot obtained at OPE mode; (b) success plot obtained at OPE mode
Fig. 5. Tracking results of different algorithms on 100 video sequences. (a) Precision plot obtained at OPE mode; (b) success plot obtained at OPE mode; (c) precision plot obtained at SRE mode; (d) success plot obtained at SRE mode; (e) precision plot obtained at TRE mode; (f) success plot obtained at TRE mode
Fig. 6. Partial tracking results on eight video sequences. (a) Tiger1; (b) DragonBaby; (c) Bird2; (d) Board; (e) Panda; (f) Jogging-1; (g) Girl2; (h) Human6
|
Table 1. Precision plot values correspond to different algorithms which are used to test sets of video sequences with different attributes at OPE mode%
|
Table 2. Success plot values correspond to different algorithms which are used to test sets of video sequences with different attributes at OPE mode%
|
Table 3. Performance evaluation of proposed algorithm in different stages at OPE mode
|
Table 4. Average tracking speed of different algorithms
|
Table 5. Attributes and relevant information of eight video sequences

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20