
Dianwei Wang, Haoyu Fang, Ying Liu, Jing Jiang, Xincheng Ren, Zhijie Xu, Yongrui Qin. Algorithm for Panoramic Video Tracking Based on Improved SiameseRPN[J]. Laser & Optoelectronics Progress, 2020, 57(24): 241008
- Laser & Optoelectronics Progress
- Vol. 57, Issue 24, 241008 (2020)
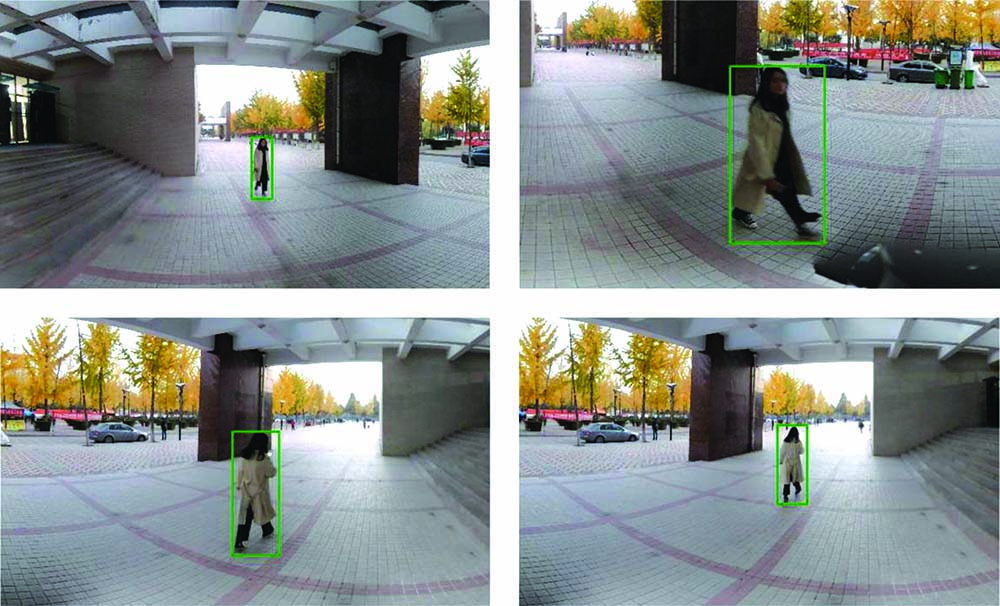
Fig. 1. Scale change of target motion in panoramic video

Fig. 2. Panoramic image stitched by seven cameras
Fig. 3. Visualization results of deep features in convolutional neural networks. (a) Conv 1; (b) Relu 1; (c) Pool 1; (d) Conv 3; (e) Relu 3; (f) Pool 3; (g) Conv 5; (h) Relu 5; (i) original image
Fig. 4. Network architecture of proposed algorithm
Fig. 5. Convolution structure in MobileNetV3
Fig. 6. Comparison among Relu6, h-swish, and swish activation functions
Fig. 7. Curve of loss function
Fig. 8. Comparison of experiment results by SiameseRPN and improved network
Fig. 9. Comparison of results by different algorithms in four different scenarios
Fig. 10. Experimental results for small targets and target occlusion
Fig. 11. Experimental results for multi-target cross movements
Fig. 12. Experimental results for similar target interference
Fig. 13. Test results of six algorithms on panoramic dataset. (a) Precision; (b) success rate
|
Table 1. Distribution of tracking difficulties in panoramic data sets
|
Table 2. Performance comparison of all algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20