
Tao Huang, Shuanfeng Zhao, Yunrui Bai, Longlong Geng. Method of Real-Time Road Target Depth Neural Network Detection for UAV Flight Control Platform[J]. Laser & Optoelectronics Progress, 2020, 57(4): 041509
- Laser & Optoelectronics Progress
- Vol. 57, Issue 4, 041509 (2020)
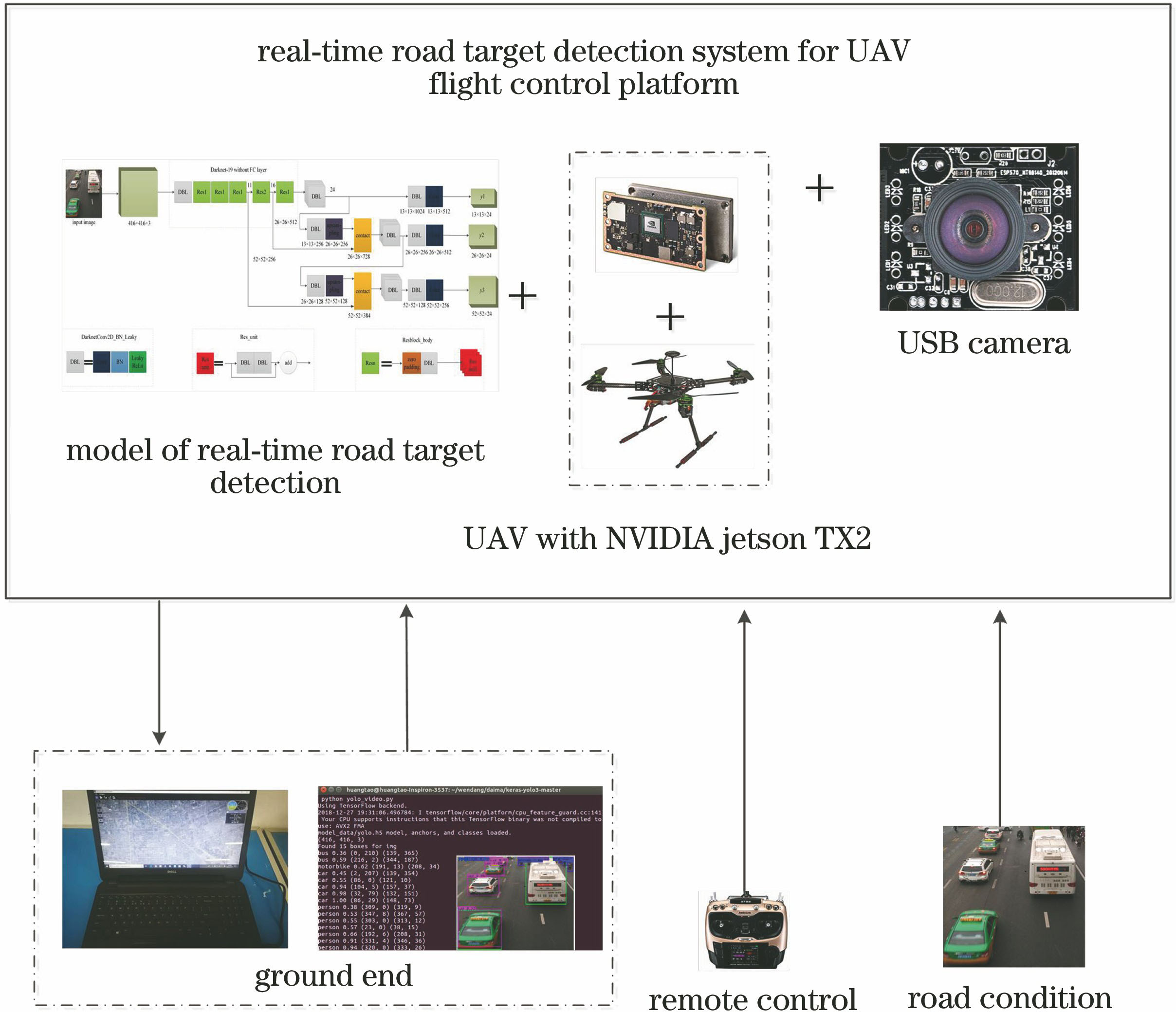
Fig. 1. System of real-time road target depth neural network detection for UAV flight control platform

Fig. 2. Model of real-time road target detection based on deep neural network
Fig. 3. Residual block
Fig. 4. Sigmoid function
Fig. 5. Schematic of the predicted bounding box of the 13×13 scale feature map
Fig. 6. Pascal VOC2007, Pascal VOC2012 and self-made VOC data set images by ourselves
Fig. 7. Map of training loss
Fig. 8. Target detection of overlapping images. (a1) and (b1) are the overlapping image detection effect of YOLOv2; (a2) and (b2) are the overlapping image detection effect of our model; (a3) and (b3) are the overlapping image detection effect of YOLOv3
Fig. 9. Target detection of different scenes. (a1) (b1) and (c1) are the object detection effect images of YOLOv2; (a2) (b2) and (c2) are the object detection effect images of our model; (a3) (b3) and (c3) are the object detection effect images of YOLOv3
Fig. 10. NVIDIA Jetson TX2 on real road target inspection. (a1) (b1) and (c1) are the object detection effect images of YOLOv2; (a2) (b2) and (c2) are the object detection effect images of our model; (a3) (b3) and (c3) are the object detection effect images of YOLOv3
Fig. 11. Detection for different targets. (a) Detection for car, bus and person in our model; (b) detection for truck in our model
|
Table 1. Training parameters
|
Table 2. Comparison of target detection performance
|
Table 3. Comparison of target detection performance on different data sets

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20