
Aiwang Huang, Danni Chen, Heng Li, Dexiang Tang, Bin Yu, Jia Li, Junle Qu, "Three-dimensional tracking of multiple particles in large depth of field using dual-objective bifocal plane imaging," Chin. Opt. Lett. 18, 071701 (2020)
- Chinese Optics Letters
- Vol. 18, Issue 7, 071701 (2020)
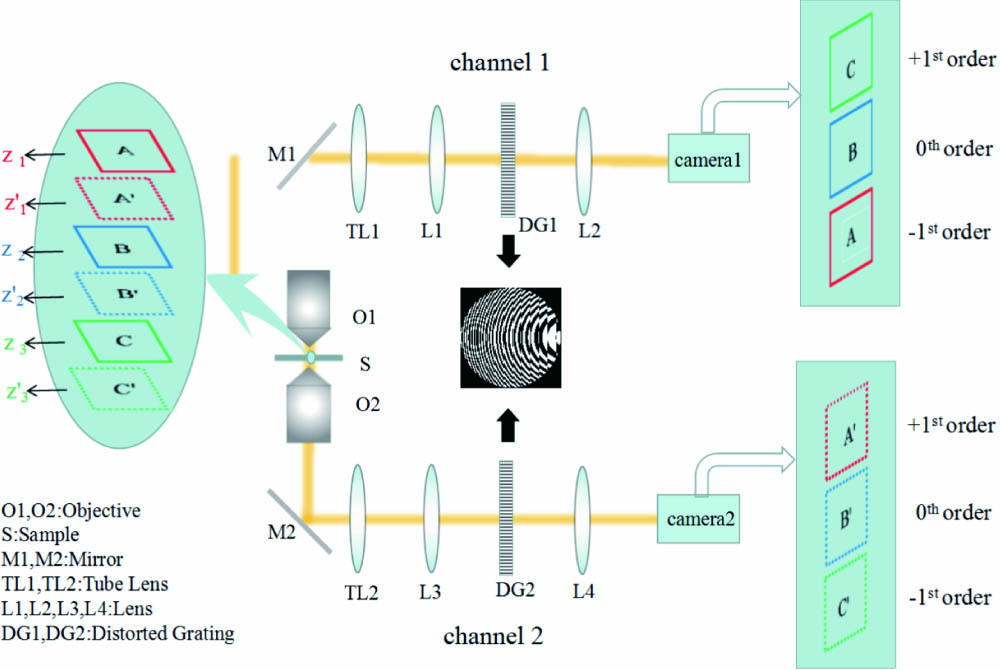
Fig. 1. Schematic diagram of DDBCM setup. The signal from particles in the sample (S) is collected by two identical objectives (O1, O2), resulting in two detection channels. In each channel, the signal passes through a tube lens (TL1 in channel 1 and TL2 in channel 2), then is modulated with a
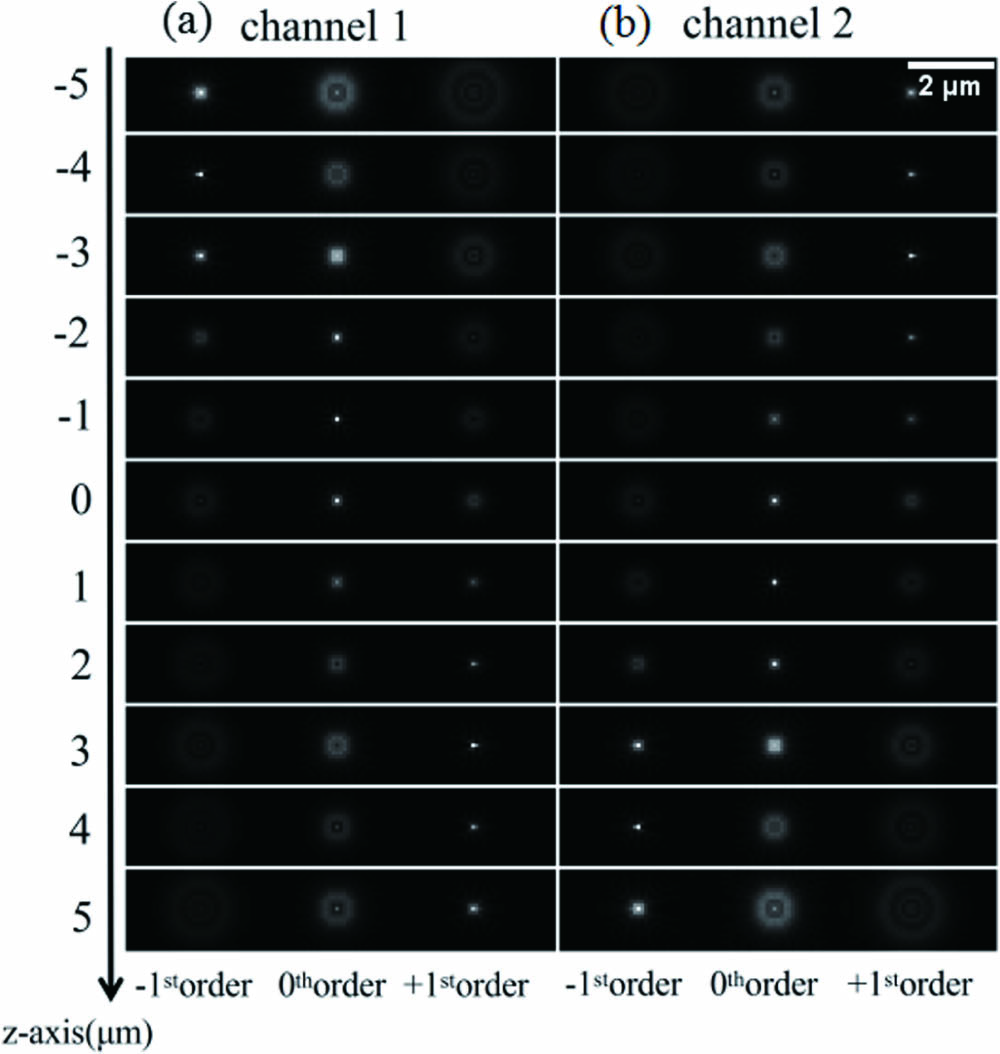
Fig. 2. Images of a single particle at 11 axial positions, from
Fig. 3. Two trajectories of two particles. (a) Trajectories of P1 (bottom-up) and P2 (top-down) with time coding by the pseudo-color. (b) Three pairs of images at three time points,
Fig. 4. Localization precision analysis of DDBCM. (a) 3D trajectories of the two particles, whose localizations were measured every 0.1 s from
Fig. 5. Comparison of the (a) lateral and (b) axial localization precision and (c) the capability of 3D localization for the DDBCM approach, the biplane approach, and the DSBCM approach, whose detection strategies are shown in the left column. In all cases, each objective is assumed to collect 3000 photons for each particle, all these photons are evenly assigned to each sub-image, and the background level is set to 2 photons/pixel.
|
Table 1. Sub-images Chosen for 3D Localization Algorithm for Different Depth Ranges


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20