
Fengguang Xiong, Wang Huo, Xie Han, Liqun Kuang. Removal Method of Mismatching Keypoints in 3D Point Cloud[J]. Acta Optica Sinica, 2018, 38(2): 0210003
- Acta Optica Sinica
- Vol. 38, Issue 2, 0210003 (2018)
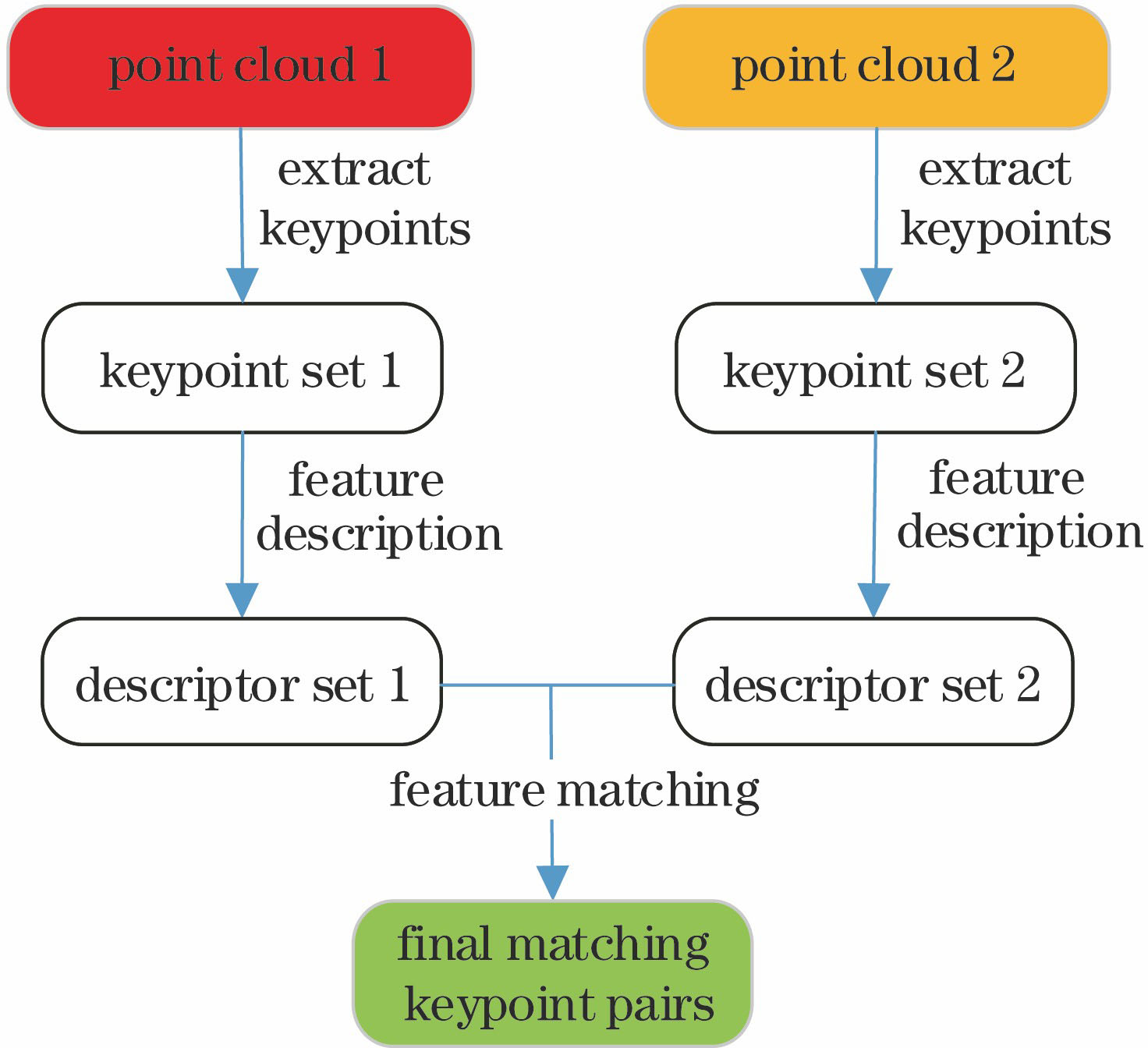
Fig. 1. Keypoint matching process of general method
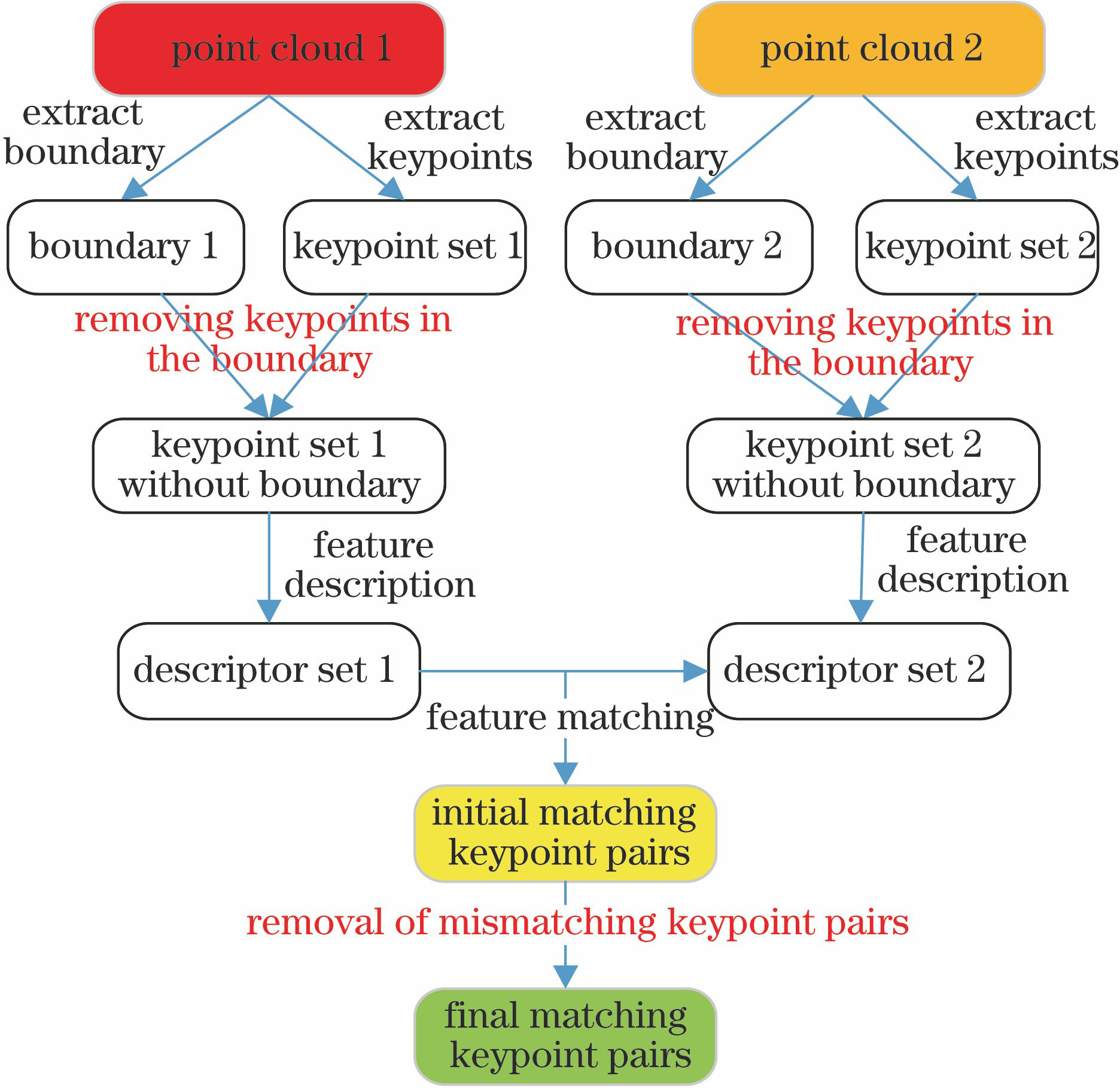
Fig. 2. Keypoint matching process of proposed method
Fig. 3. Sketch map of intersection angle
Fig. 4. Examples of 3D point cloud. (a) Bunny'; (b) Bunny″; (c) Armadillo' ; (d) Armadillo″; (e) chef; (f) rs1; (g) rs4; (h) bun000; (i) bun045; (j) top2; (k) bun180
Fig. 5. State chart of 3D point cloud
Fig. 6. Matching graphs between Bunny' and Bunny″. (a) Matching by NN algorithm; (b) matching by RANSAC algorithm; (c) matching by proposed algorithm
Fig. 7. Matching graphs between Armadillo' and Armadillo″. (a) Matching by NN algorithm; (b) matching by RANSAC algorithm; (c) matching by proposed algorithm
Fig. 8. Matching graphs between chef and rs1. (a) Matching by NN algorithm; (b) matching by RANSAC algorithm; (c) matching by proposed algorithm
Fig. 9. Matching graphs between chef and rs4. (a) Matching by NN algorithm; (b) matching by RANSAC algorithm; (c) matching by proposed algorithm
Fig. 10. Matching graphs of bun045 and bun000. (a) Matching by NN algorithm; (b) matching by RANSAC algorithm; (c) matching by proposed algorithm
Fig. 11. Matching graphs of top2 and bun180. (a) Matching by NN algorithm; (b) matching by RANSAC algorithm; (c) matching by proposed algorithm
|
Table 1. Information about points in the 3D point cloud and the time of removing keypoints on the edge
|
Table 2. Matching results between complete 3D point cloud and complete 3D point cloud
|
Table 3. Matching results between complete 3D point cloud and 3D point cloud with clutter and occlusion
|
Table 4. Matching results between partial 3D point cloud and partial 3D point cloud
|
Table 5. Comparison of matching time

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20