
Wenyi Chen, Jie Xu, Hui Yang. Camera calibration method based on double neural network[J]. Infrared and Laser Engineering, 2021, 50(11): 20210071
- Infrared and Laser Engineering
- Vol. 50, Issue 11, 20210071 (2021)
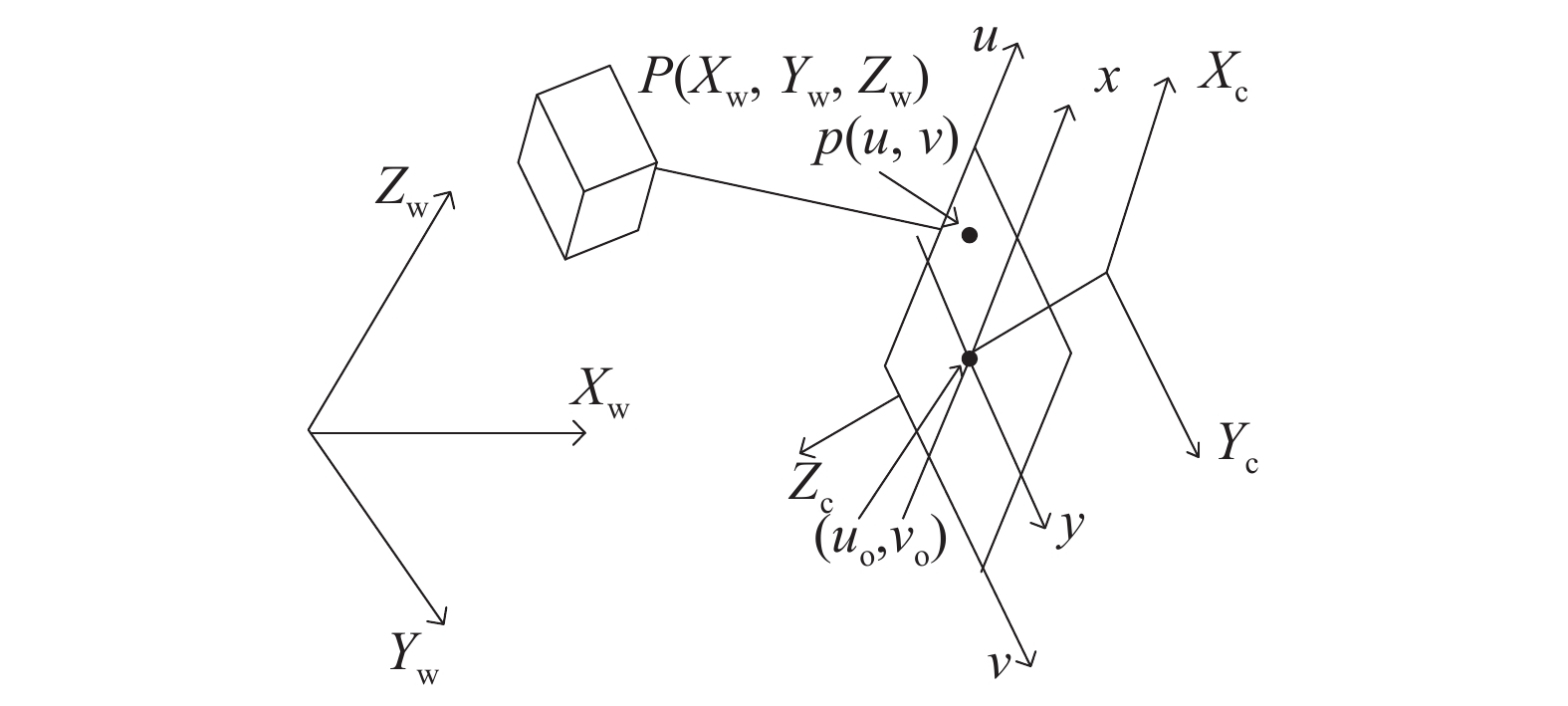
Fig. 1. Relationship between coordinate systems
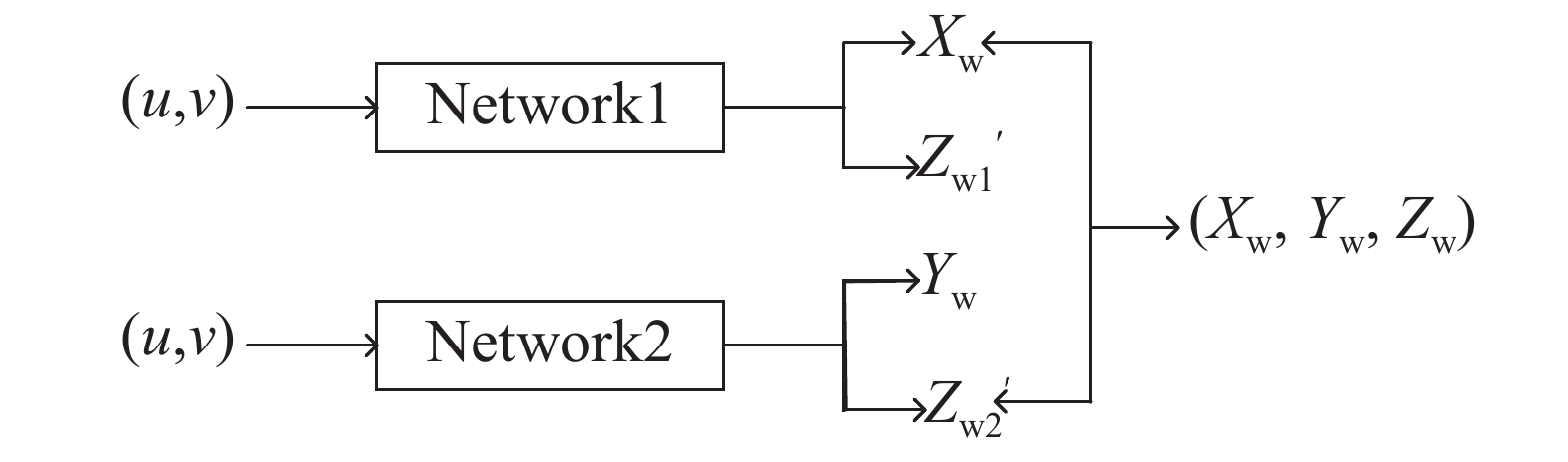
Fig. 2. Camera calibration based on double neural networks
Fig. 3. Schematic diagram of BP network model
Fig. 4. Flow chart of PSO-BP algorithm
Fig. 5. Schematic diagram of optical axis correction
Fig. 6. Schematic diagram of calibration plate correction
Fig. 7. Experimental platform
Fig. 8. Training chart of PSO-BP double neural network algorithm
Fig. 9. Training curve of traditional BP neural network
Fig. 10. Result of Z -axis output error
Fig. 11. Image of 3D reconstruction
Fig. 12. Distorted image
|
Table 1. Influence of hidden layer node number on experimental results
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Error of partial calibration point
| ||||||||||||||||||||||||||||
Table 3. Calibration error of different methods under the condition of high lens distortion

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20