
Tao Song, Libo Cao, Mingfu Zhao, Shuai Liu, Yuhang Luo, Xin Yang. Registration and Optimization Algorithm of Key Points in Three-Dimensional Point Cloud[J]. Laser & Optoelectronics Progress, 2021, 58(4): 0415008
- Laser & Optoelectronics Progress
- Vol. 58, Issue 4, 0415008 (2021)
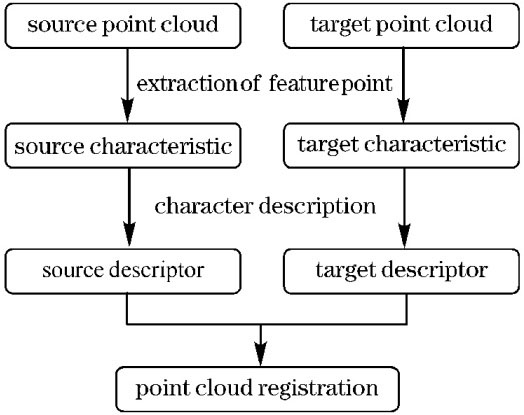
Fig. 1. Flow chart of the 3D point cloud registration algorithm
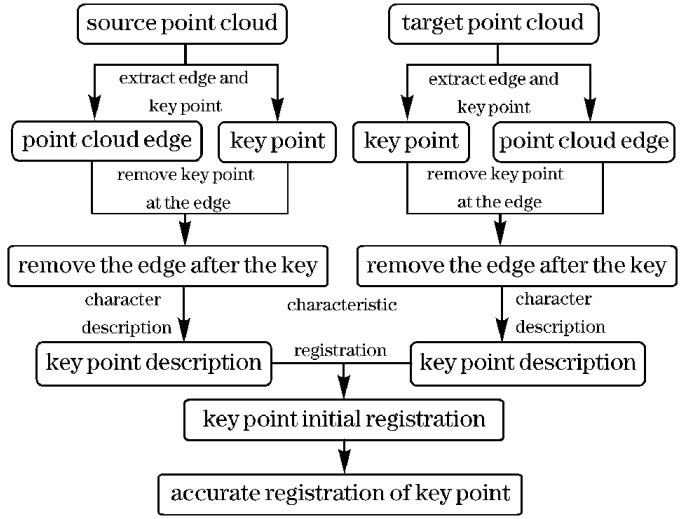
Fig. 2. Registration flow chart of our algorithm
Fig. 3. Schematic diagram of the selecting edge points of the 3D point cloud
Fig. 4. Local coordinate system
Fig. 5. Scope of influence of the descriptor
Fig. 6. Image of the original 3D point cloud. (a) bun_zipper; (b) bun_zipper_tran; (c) bun_zipper_res2; (d) bun_zipper_res2_tran; (e) Armadilloside_60; (f) Armadilloside_90; (g) happySideRight_0; (h) happySideRight_24
Fig. 7. 3D point cloud with edge detection and removal of key points on the edge. (a) Result of the extraction of key points; (b) result of the edge detection; (c) result of the removing key points of the edge
Fig. 8. Result of the complete point cloud registration optimization. (a) Our algorithm; (b) traditional algorithm
Fig. 9. Result of partial point cloud registration optimization. (a) Our algorithm; (b) traditional algorithm
|
Table 1. Results of the key points selection and edge point elimination
| |||||||||||||||||||||||||||||
Table 2. Error scores and time after registration of the two algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20