
Li CHEN, Shi-yong WANG, Si-li GAO, Chang TAN, Lin-han LI. Multispectral Lightweight Ship Target Detection Algorithm for Sentinel-2 Satellite[J]. Spectroscopy and Spectral Analysis, 2022, 42(9): 2862
- Spectroscopy and Spectral Analysis
- Vol. 42, Issue 9, 2862 (2022)
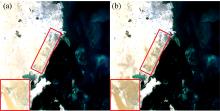
Fig. 1. Comparison of images before and after atmospheric correction
(a): Before atmospheric correction; (b): After atmospheric correction
(a): Before atmospheric correction; (b): After atmospheric correction

Fig. 2. Algorithm flow chart
Fig. 3. Spectral curves of typical surface features
Fig. 4. Comparison of NDWI and PNDWI extractions for seawater with and without sediment
(a): RGB image of seawater with sediment; (b): NIR image of seawater with sediment; (c): NDWI for seawater with sediment; (d): PNDWI for seawater with sediment; (e): RGB image of seawater without sediment; (f): NIR image of seawater without sediment; (g): NDWI for seawater without sediment; (h): PNDWI for seawater without sediment
(a): RGB image of seawater with sediment; (b): NIR image of seawater with sediment; (c): NDWI for seawater with sediment; (d): PNDWI for seawater with sediment; (e): RGB image of seawater without sediment; (f): NIR image of seawater without sediment; (g): NDWI for seawater without sediment; (h): PNDWI for seawater without sediment
Fig. 5. Statistical box plots of pixel values of 5 scenes in 4 bands and box plot interpretation
(a): Ship; (b): Thick clouds; (c): Thin clouds; (d): Smooth sea; (e): Sea clutter; (f): Box plot interpretation
(a): Ship; (b): Thick clouds; (c): Thin clouds; (d): Smooth sea; (e): Sea clutter; (f): Box plot interpretation
Fig. 6. Process of assisting determination
(a): RGB; (b): NIR; (c): PNDWI; (d): Assisting determination
(a): RGB; (b): NIR; (c): PNDWI; (d): Assisting determination
Fig. 7. An example of candidate region slice extraction
Fig. 8. (a)Schematic diagram of spectral feature extraction, (b)1×1 convolution diagram
Fig. 9. Channel shuffling diagram
Fig. 10. 1×1 Diagram of the LSGFNet network structure
Fig. 11. Part of the sample data for fine detection
Fig. 12. Loss reduction (a) and precision variation (b) of verification set with an interation of 10 000
Fig. 13. Detection result
(a): RGB; (b): NIR; (c): Binary images of rough detection; (d): Fine detection
(a): RGB; (b): NIR; (c): Binary images of rough detection; (d): Fine detection
|
Table 1. Rough dectection results of ships
|
Table 2. Comparison of lightweight network algorithms for test set
|
Table 3. Comparison of detection results by different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20