
Ning Mao, Jiangning Xu, Hongyang He, Miao Wu. Real-Time Compensation of Fiber Optic Gyroscope Zero-Drift Based on Online-SVR Model[J]. Laser & Optoelectronics Progress, 2022, 59(1): 0106002
- Laser & Optoelectronics Progress
- Vol. 59, Issue 1, 0106002 (2022)
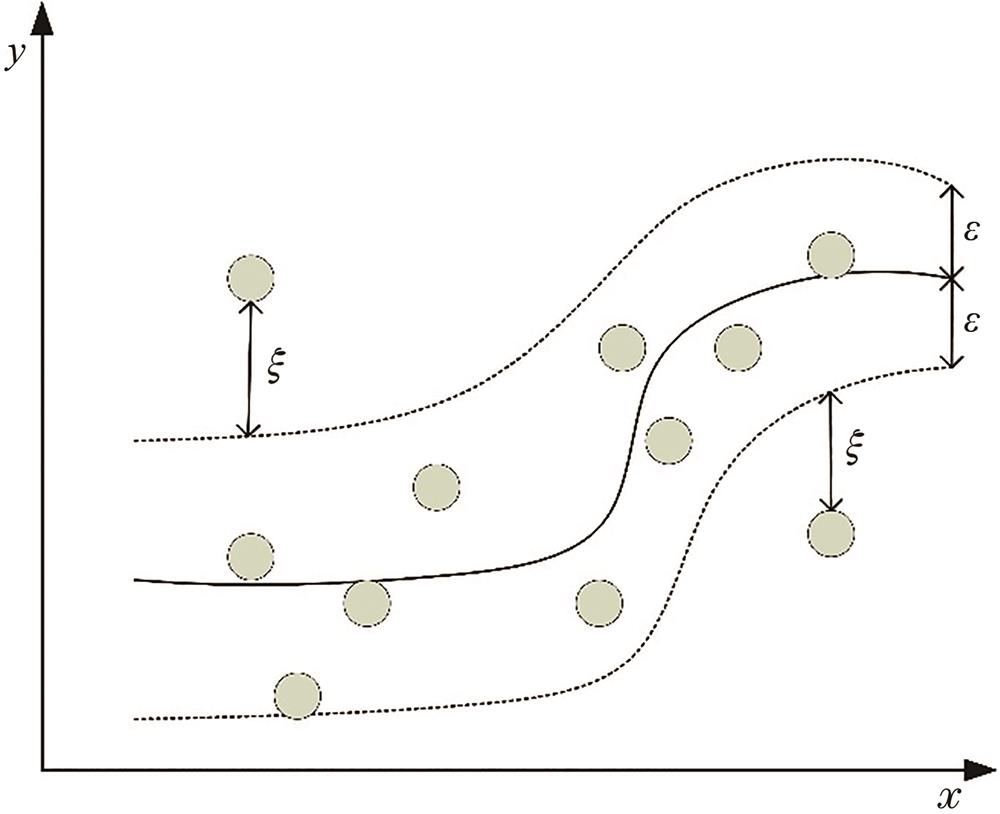
Fig. 1. Basic schematic diagram of SVR
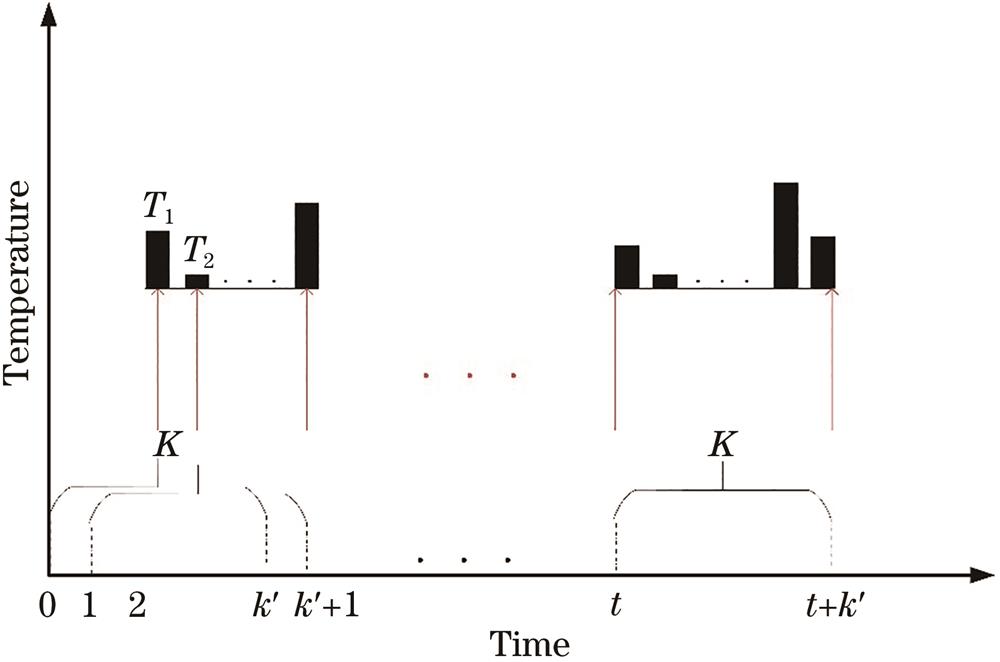
Fig. 2. Principle of real-time acquisition of temperature change rate
Fig. 3. Online compensation of FOG zero-bias
Fig. 4. Original FOG output, temperature change rate, and temperature varying with time
Fig. 5. Compensation effect of RBF neural networks. (a) Zero-drift compensation curve of gyro; (b) residual error
Fig. 6. Compensation effect of SVR. (a) Zero-drift compensation curve of gyro; (b) residual error
Fig. 7. Compensation effect of Online-SVR. (a) Zero-drift compensation curve of gyro; (b) residual error
|
Table 1. Comparison of statistical results before and after the compensation for FOG zero-drift data
|
Table 2. Compensation time
|
Table 3. Comparison of error coefficients of noise before and after compensation

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20