
Ziyi Cheng, Rongsheng Lu, Cuili Mao. Measurement Method of Three-Dimensional Shape of Bright Surface with Binocular Stereo Vision[J]. Laser & Optoelectronics Progress, 2020, 57(7): 071202
- Laser & Optoelectronics Progress
- Vol. 57, Issue 7, 071202 (2020)
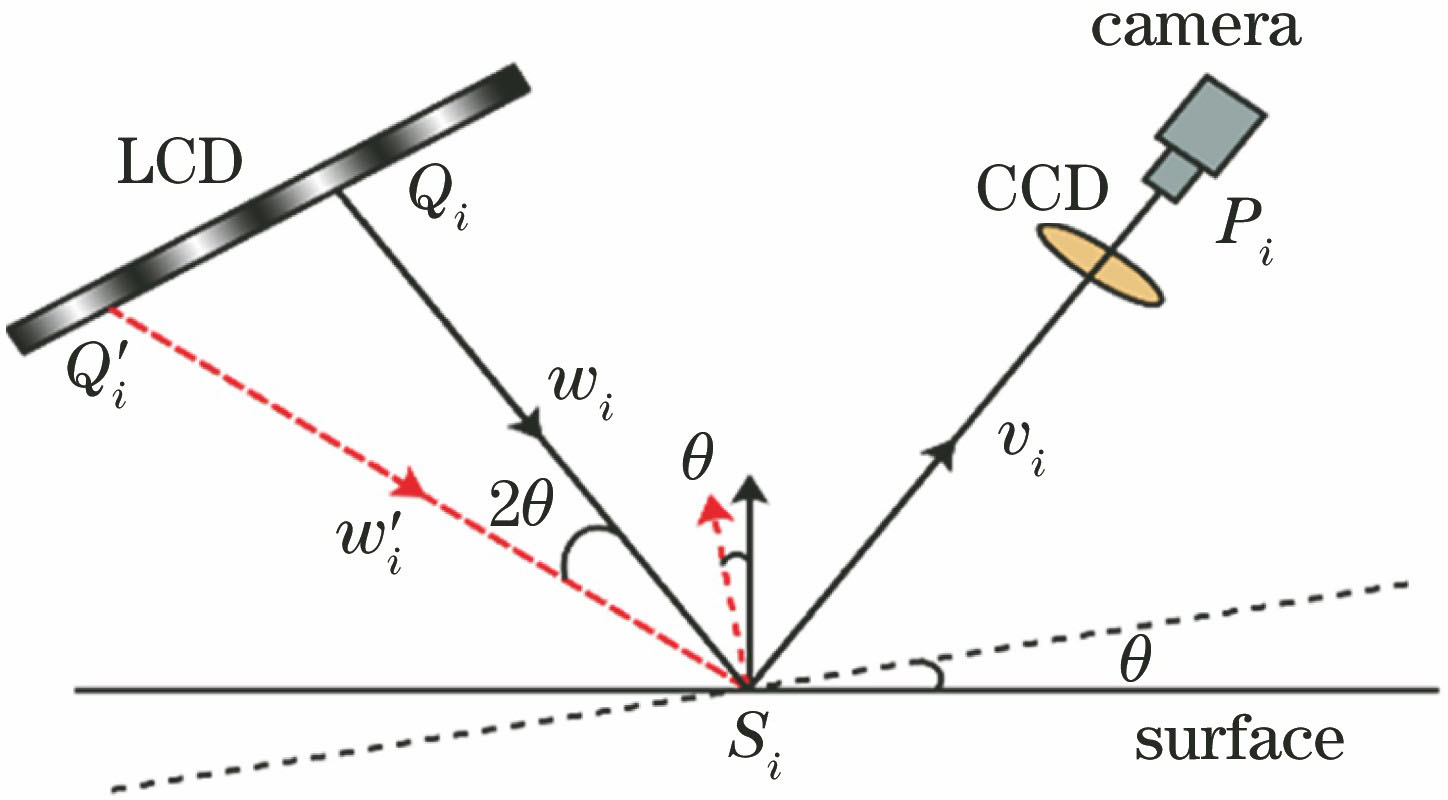
Fig. 1. Schematic of phase deflection measurement system
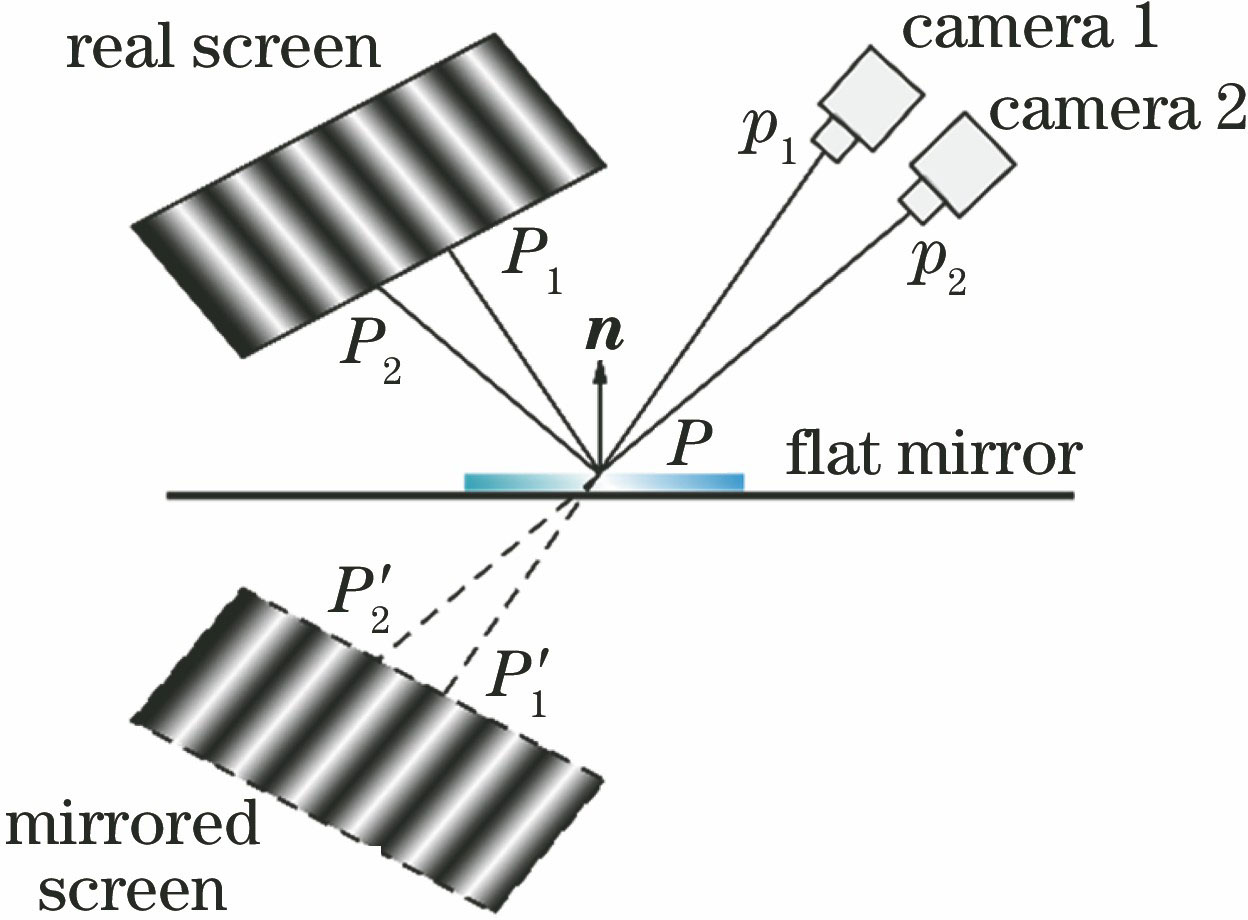
Fig. 2. Measurement schematic of binocular stereo vision system
Fig. 3. Schematic of space point coordinate calculation model
Fig. 4. Flow chart of binocular camera calibration
Fig. 5. Calibration plate
Fig. 6. Specular reflection model
Fig. 7. Comparison of reprojection results before and after screen external parameter optimization
Fig. 8. Schematic of measurement system. (a) Correct matching; (b) mismatching
Fig. 9. Device diagram of measurement system. (a) Integral measuring device; (b) binocular local device; (c) specular fringe pattern
Fig. 10. [in Chinese]
Fig. 10. Measurement results of standard plane mirror shape. (a) Plane mirror physical image; (b) reconstructed point cloud image; (c) global error diagram of plane mirror; (d) plane mirror point cloud image of two positions
Fig. 11. Fitting results of CMM for rearview mirror measurement. (a) Fitting the surface of rearview mirror; (b) fitting error distribution
Fig. 12. Measurement results of rearview mirror shape. (a) Rearview mirror physical image; (b) reconstruction point cloud image; (c) global error diagram of rearview mirror; (d) microscopic surface at X direction of -30 mm
Fig. 12. [in Chinese]
|
Table 1. Comparison results of rearview mirror point cloudmm

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20