
Shun Yao, Yongmei Cheng, Huixia Liu, Jiawei Xiao, Zhaoxu Tian, Li Dai, Su Yang. Cooperative Beacon Design Method for Fixed Wing Unmanned Aerial Vehicles with Visual in Landing[J]. Acta Optica Sinica, 2019, 39(3): 0315004
- Acta Optica Sinica
- Vol. 39, Issue 3, 0315004 (2019)
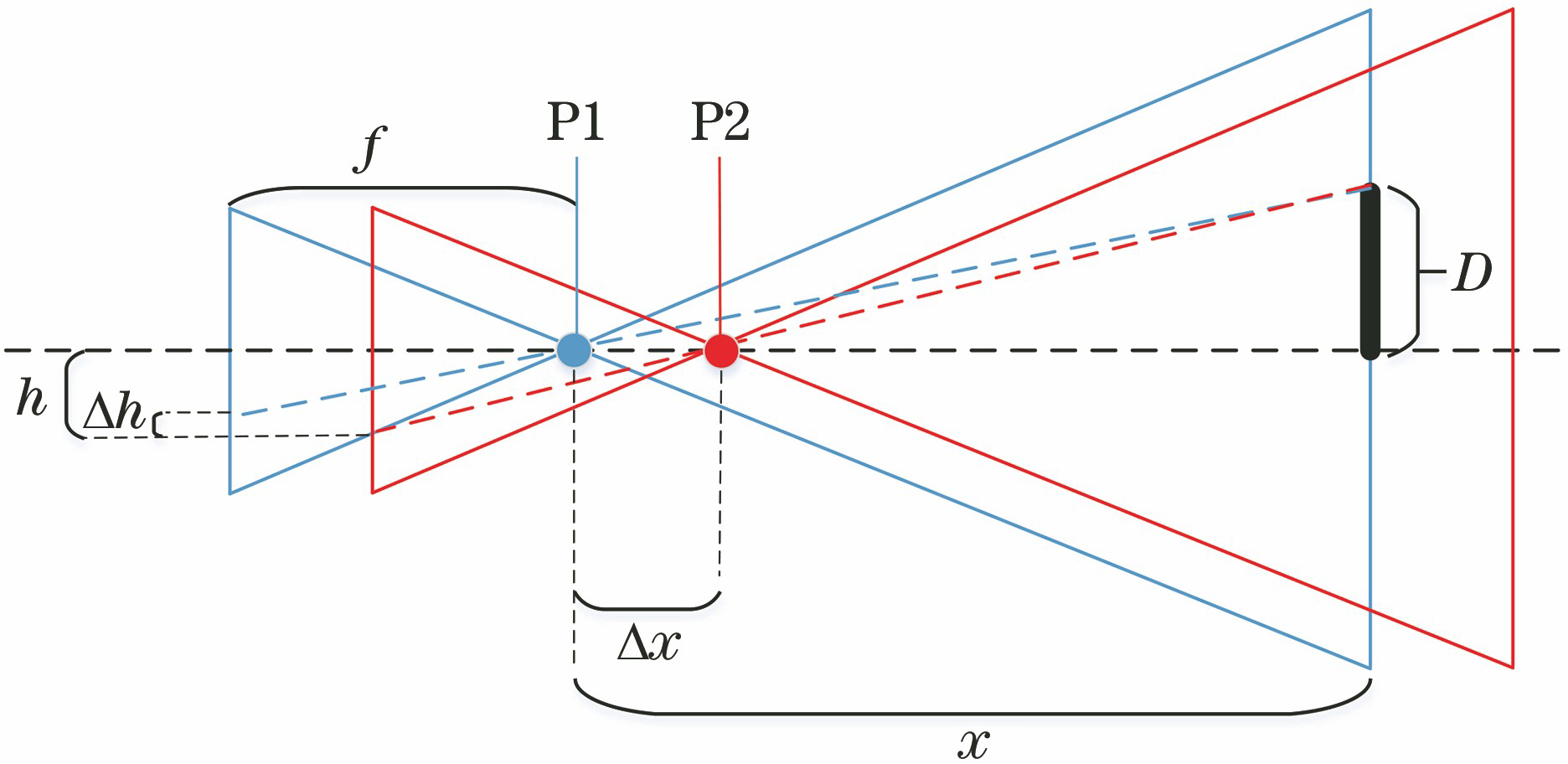
Fig. 1. Schematic for calculating projection distance of beacon feature points
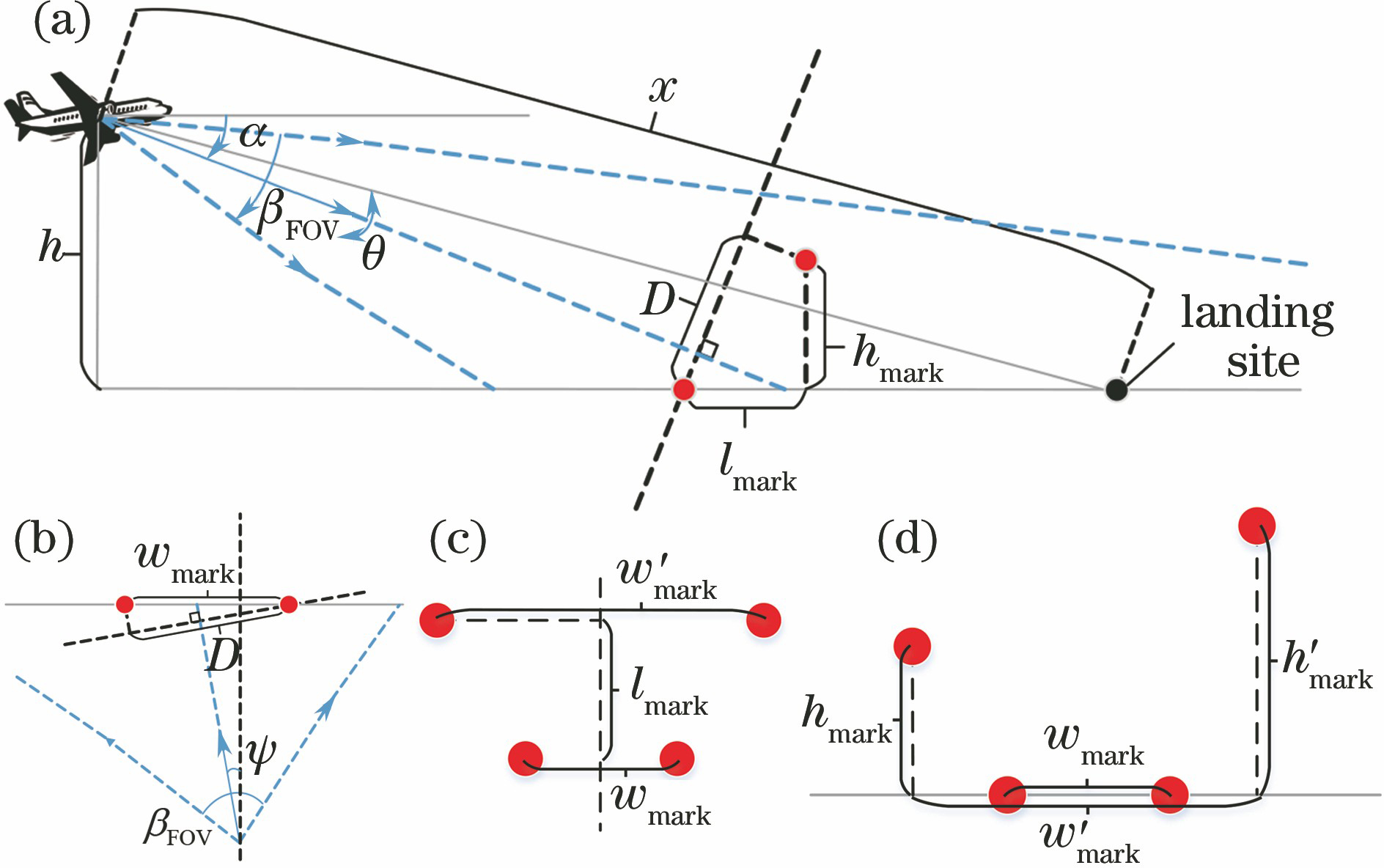
Fig. 2. Layouts of cooperative beacon. (a) With pitch angle; (b) with yaw angle; (c) vertical view; (d) front view
Fig. 3. Schematic of design. (a) Range for cooperative beacon set; (b) field of view of UAV
Fig. 4. OpenGL simulation. (a) Module diagram; (b) flow chart
Fig. 5. Visual simulation images. (a) 150 m; (b) 550 m; (c) 1000 m
Fig. 6. Relationship between D and RDS
|
Table 1. State of UAV in landing
| ||||||||||||||||||||||
Table 2. [in Chinese]
| |||||||||||||||||||||||||||||||||||||||||
Table 3. [in Chinese]

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20