
Yang Li, Guoming Wang, Ying Wang, Zhi Cheng, Weihu Zhou, Dengfeng Dong. Calibration method of liquid lens focusing system for machine vision measurement[J]. Infrared and Laser Engineering, 2022, 51(6): 20210472
- Infrared and Laser Engineering
- Vol. 51, Issue 6, 20210472 (2022)
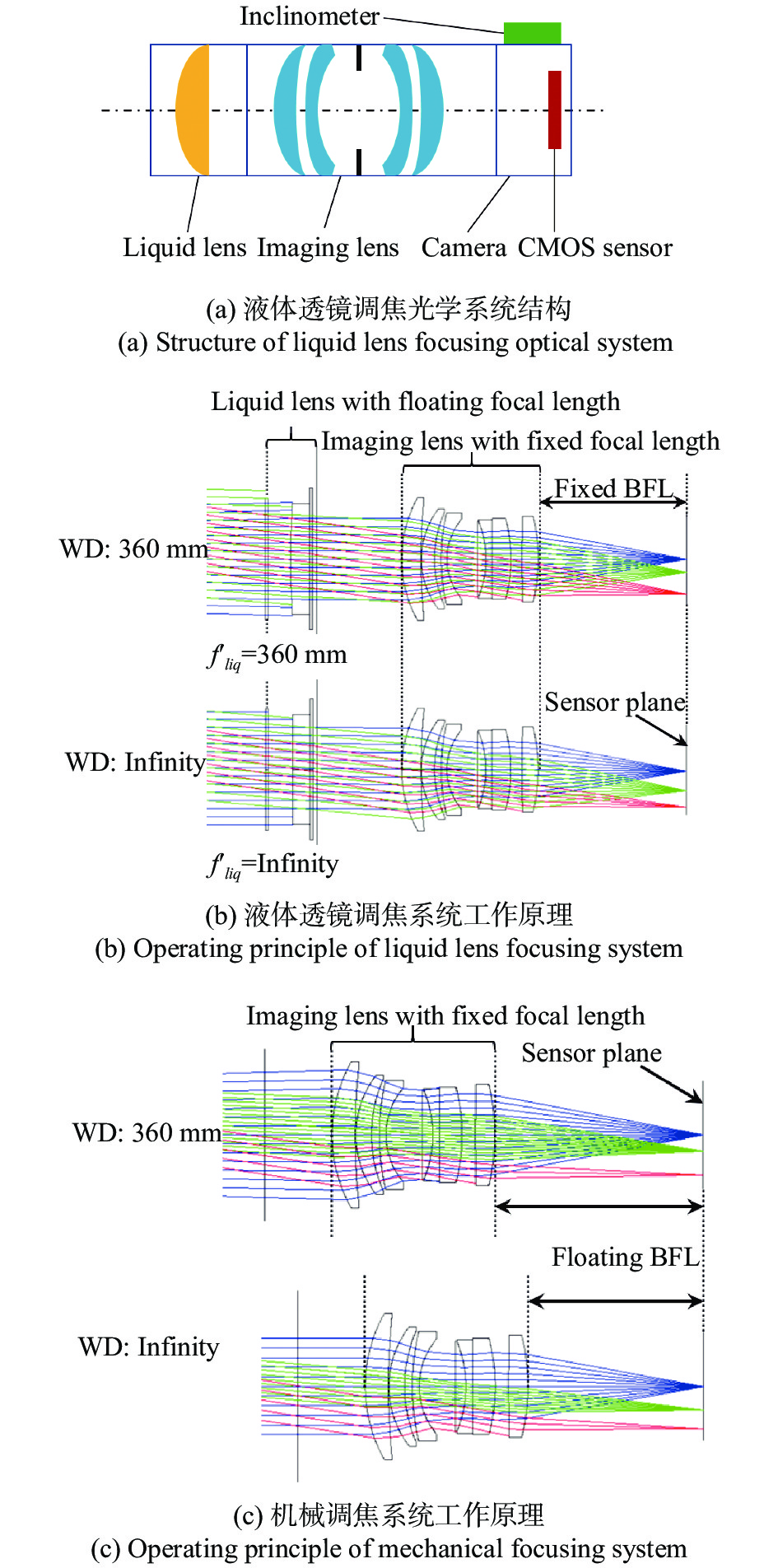
Fig. 1. Optical scheme of liquid lens focusing system and working principle of typical focusing system
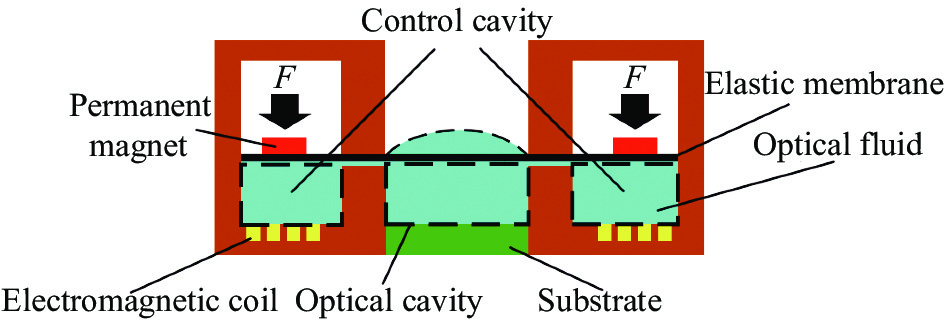
Fig. 2. Structure diagram and electric controlling principle of liquid lens based on elastic membrane cavity
Fig. 3. Cylindrical mechanical model of liquid lens
Fig. 4. Relationship between liquid lens' surface vertex offset and deflection angle of chief ray
Fig. 5. Environmental influence calibration device
Fig. 6. System parameter calibration devices
Fig. 7. Test data and fit result of reference temperature equivalent current
Fig. 8. Calibration result of gravity induced principle point offset
Fig. 9. Statistical result of positional error using intrinsic parameters acquired by different methods
| |||||||||||||||||||||||||||||||||||
Table 1. Expression of intrinsic parameters and fitted coefficients

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20