
Ni Zeng, Jinlong Li, Xiaorong Gao, Yu Zhang, Lin Luo. Efficient Filtering and Smoothing Algorithm For Train Key Components Based on Scattered Point Clouds[J]. Laser & Optoelectronics Progress, 2023, 60(14): 1410011
- Laser & Optoelectronics Progress
- Vol. 60, Issue 14, 1410011 (2023)
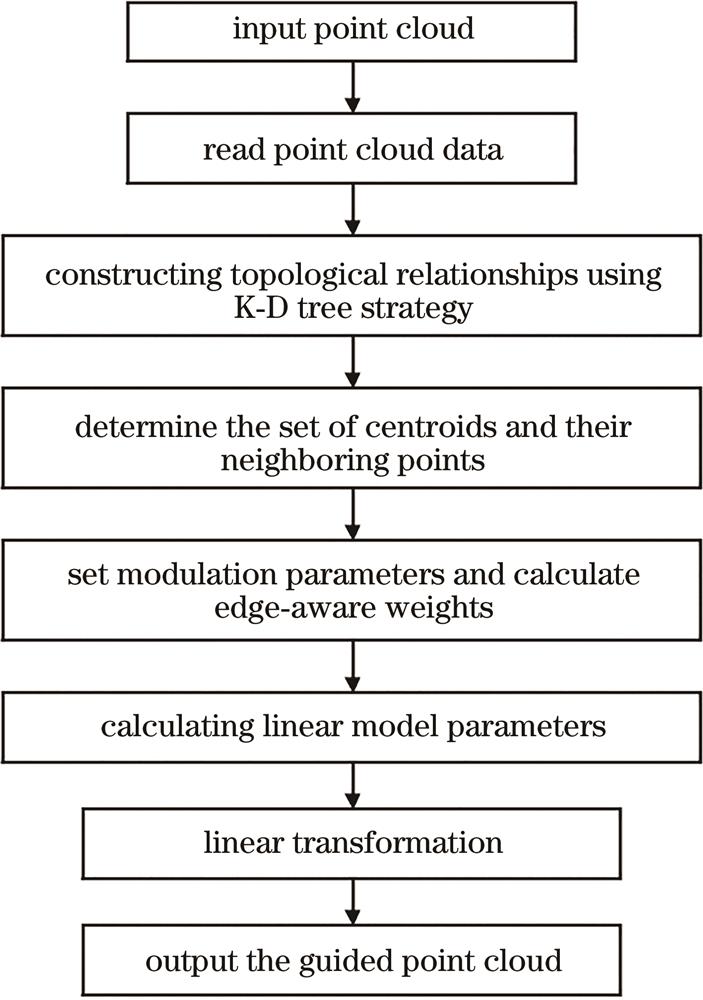
Fig. 1. Point cloud adaptive weighted guided filtering

Fig. 2. Diagram of K-D tree space division
Fig. 3. Schematic of KNN algorithm
Fig. 4. Comparison of train wheel pair point clouds before and after filtering. (a) Standard point cloud; (b) after applying Gaussian noise; (c) bilateral filtering; (d) guided filtering; (e) adaptive weighted guided filtering
Fig. 5. Comparison of train bogie point clouds before and after filtering. (a) Standard point cloud; (b) after applying Gaussian noise; (c) bilateral filtering; (d) guided filtering; (e) adaptive weighted guided filtering
Fig. 6. Comparison of train component 1. (a) Original point cloud; (b) bilateral filtering; (c) guided filtering; (d) adaptive weighted guided filtering
Fig. 7. Comparison of train component 2. (a) Original point cloud; (b) bilateral filtering; (c) guided filtering; (d) adaptive weighted guided filtering
Fig. 8. Comparison of train component 3. (a) Original point cloud; (b) bilateral filtering; (c) guided filtering; (d) adaptive weighted guided filtering
Fig. 9. Comparison of train component 4. (a) Original point cloud; (b) bilateral filtering; (c) guided filtering; (d) adaptive weighted guided filtering
Fig. 10. Comparison of train component 5. (a) Original point cloud; (b) bilateral filtering; (c) guided filtering; (d) adaptive weighted guided filtering
Fig. 11. Comparison of train component 6. (a) Original point cloud; (b) bilateral filtering; (c) guided filtering; (d) adaptive weighted guided filtering
|
Table 1. Train wheel pair point cloud filtering results
|
Table 2. Train bogie point cloud filtering results
|
Table 3. Number of point clouds of train components
|
Table 4. Comparison of filtering time for different number of point cloud components

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20