
Yongwei Gao, Wenjun Chen, Junjie Yao, Xinlong Zhu, Ning Zhao, Xudong Zhang, Wenfeng Zhang, Peng Ju. Coordinate unification between treatment room and the robot system of Heavy Ion Medical Machine[J]. High Power Laser and Particle Beams, 2023, 35(6): 064002
- High Power Laser and Particle Beams
- Vol. 35, Issue 6, 064002 (2023)
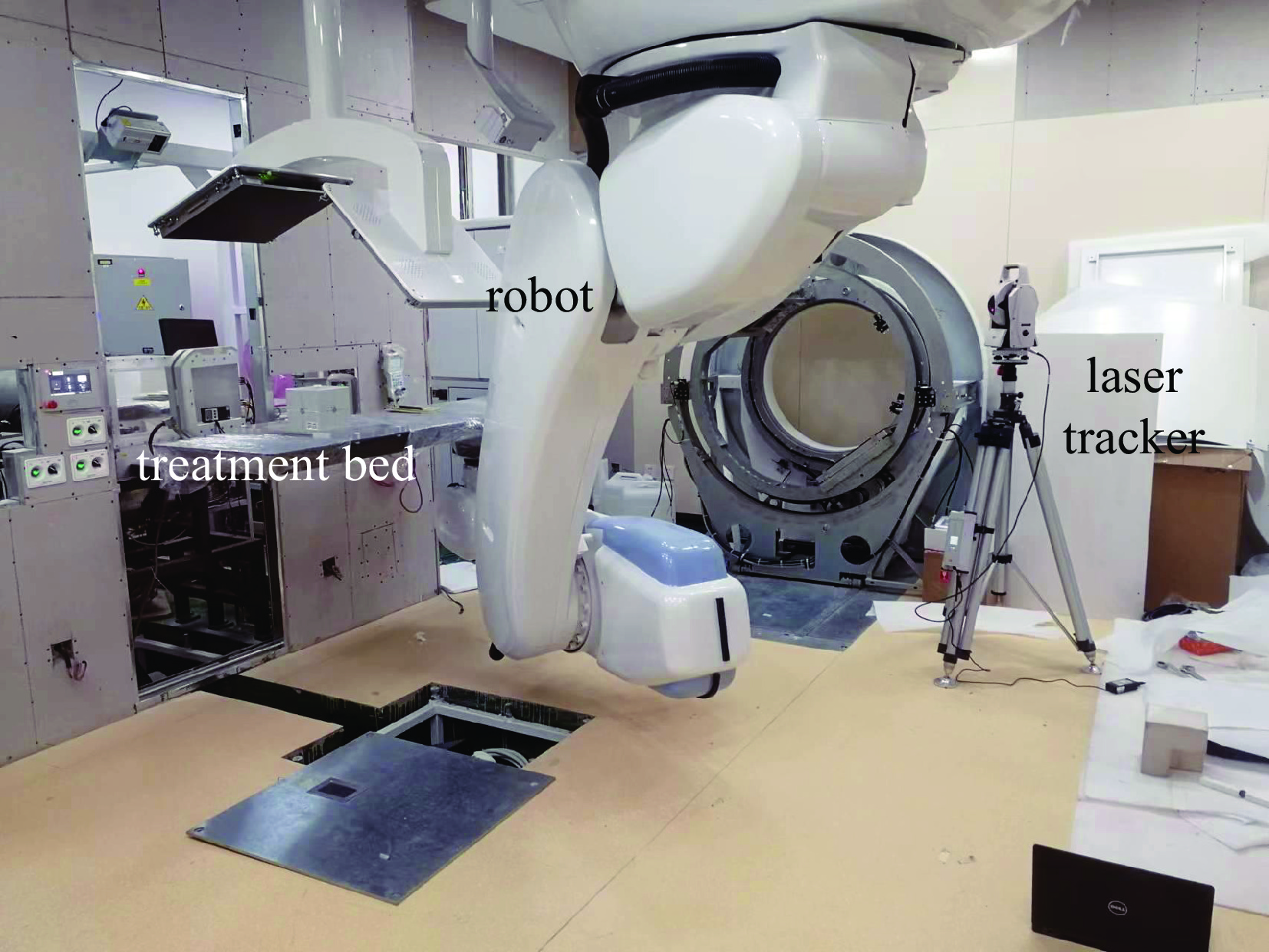
Fig. 1. Treatment room robot and treatment bed
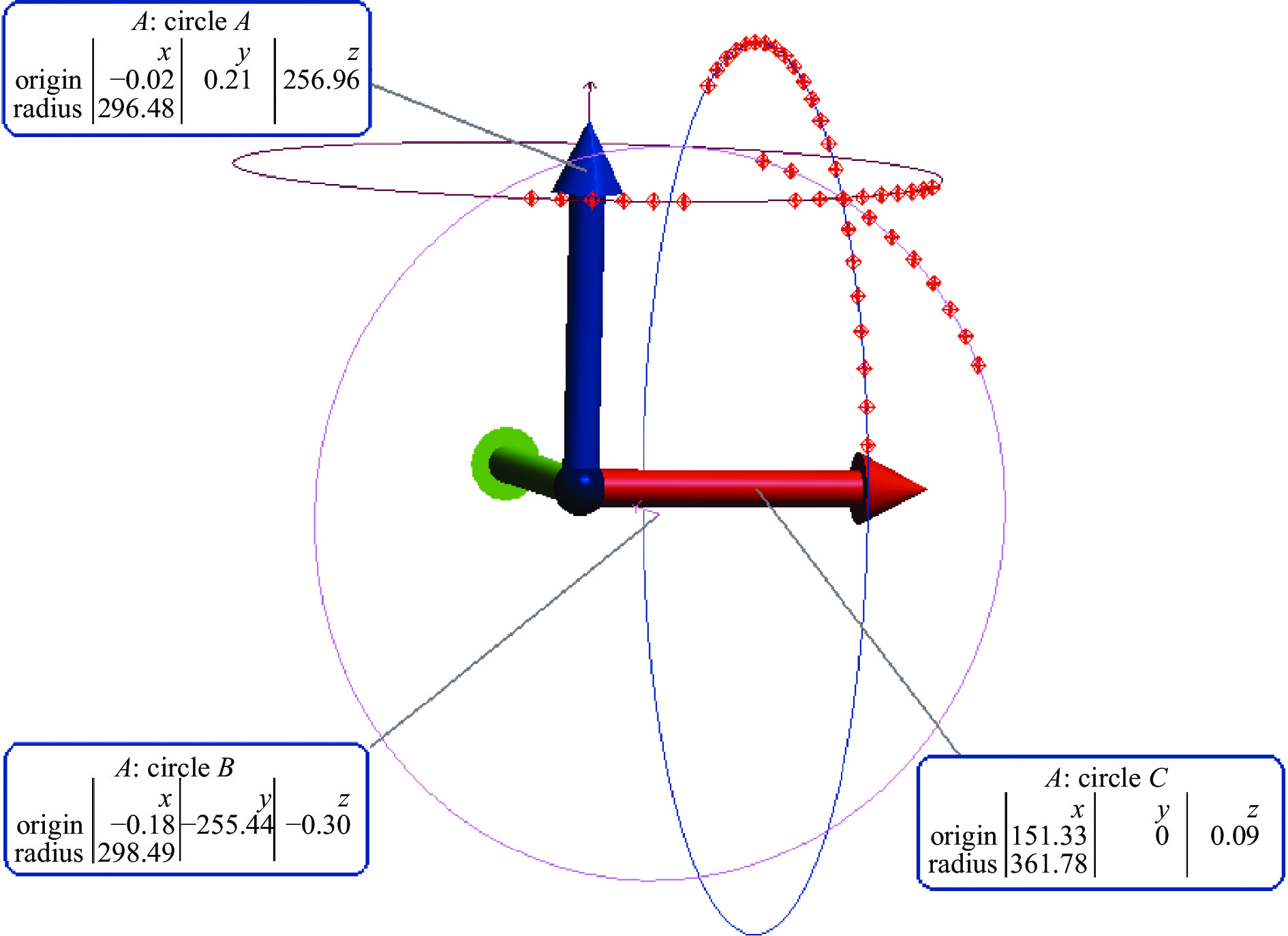
Fig. 2. Robot flange center coordinate system created
Fig. 3. Error comparison before and after the conversion of the coordinate system
|
Table 1. Center position parameters of the flange on the teach pendant
|
Table 2. Coordinates of the calibration point in the ISO coordinate system of the treatment room
|
Table 3. Coordinates of the calibration point under the robot base system
|
Table 4. Coordinate conversion accuracy

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20