
Lulu Zeng, Shaoyan Gai, Feipeng Da, Yuan Huang. Hole Filling Algorithm of Three-Dimensional Point Cloud Based on Structure from Motion[J]. Acta Optica Sinica, 2018, 38(6): 0610002
- Acta Optica Sinica
- Vol. 38, Issue 6, 0610002 (2018)
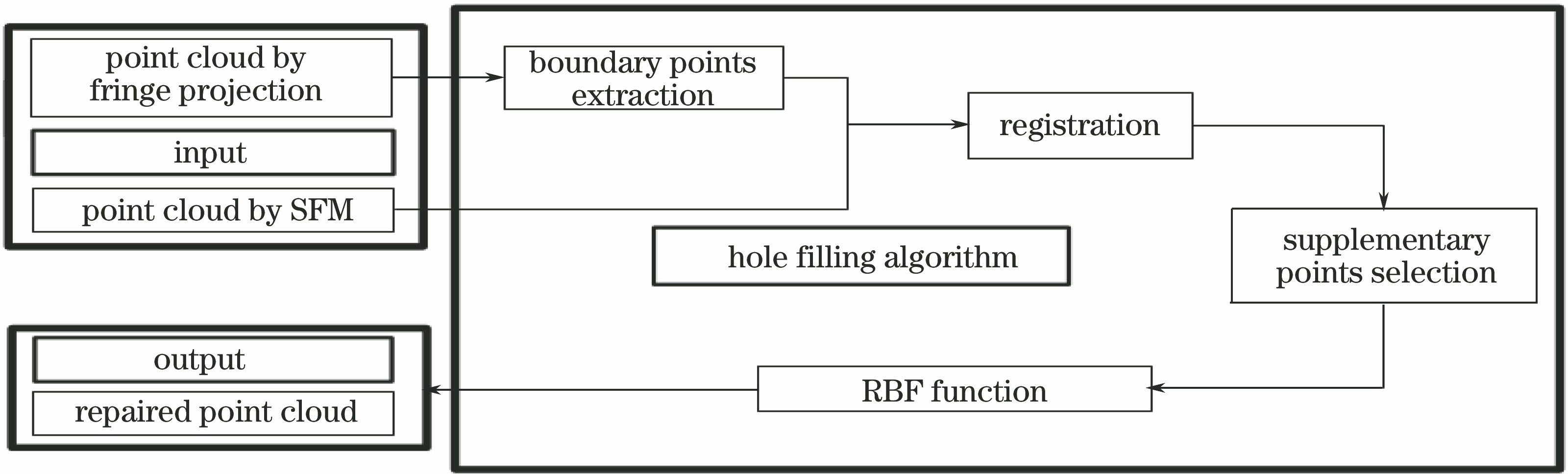
Fig. 1. Flow of algorithm
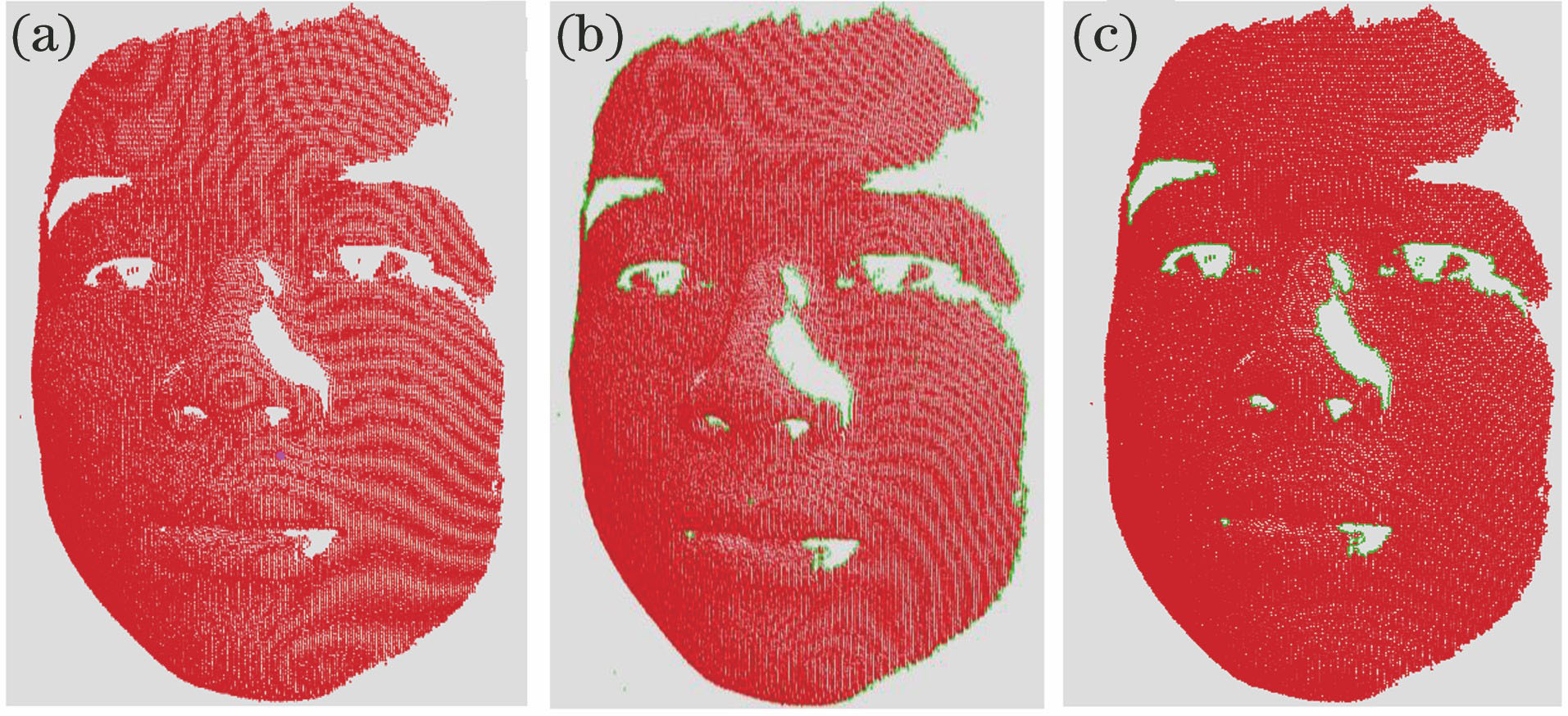
Fig. 2. Hole boundary extraction. (a) Initial point cloud; (b) boundary; (c) hole boundary
Fig. 3. Repaired point cloud of ceramic cup. (a) Fringe projection; (b) SFM; (c) repaired point cloud
Fig. 4. Repaired point cloud of human face. (a) Fringe projection; (b) SFM; (c) repaired point cloud
Fig. 5. Positions of man-made holes. (a) Complete point cloud; (b) holes in area of nose and cheek; (c) holes in area between eyebrows
Fig. 6. Repair results corresponding to Fig. 5(b). (a) Complete point cloud; (b) left view of repaired point cloud; (c) top view of repaired point cloud; (d) point cloud after registration
Fig. 7. Repair results corresponding to Fig. 5(c). (a) Complete point cloud; (b) left view of repaired point cloud; (c) top view of repaired point cloud; (d) point cloud after registration
|
Table 1. Comparison between implemented points and initial points

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20