
Zhiyong Zhang, Linggang Kong, Duojin Fan, Xiaoming Yao. Analysis of Light Concentration Error and Compensation Algorithm of Linear Fresnel Collector[J]. Laser & Optoelectronics Progress, 2022, 59(7): 0708001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 7, 0708001 (2022)
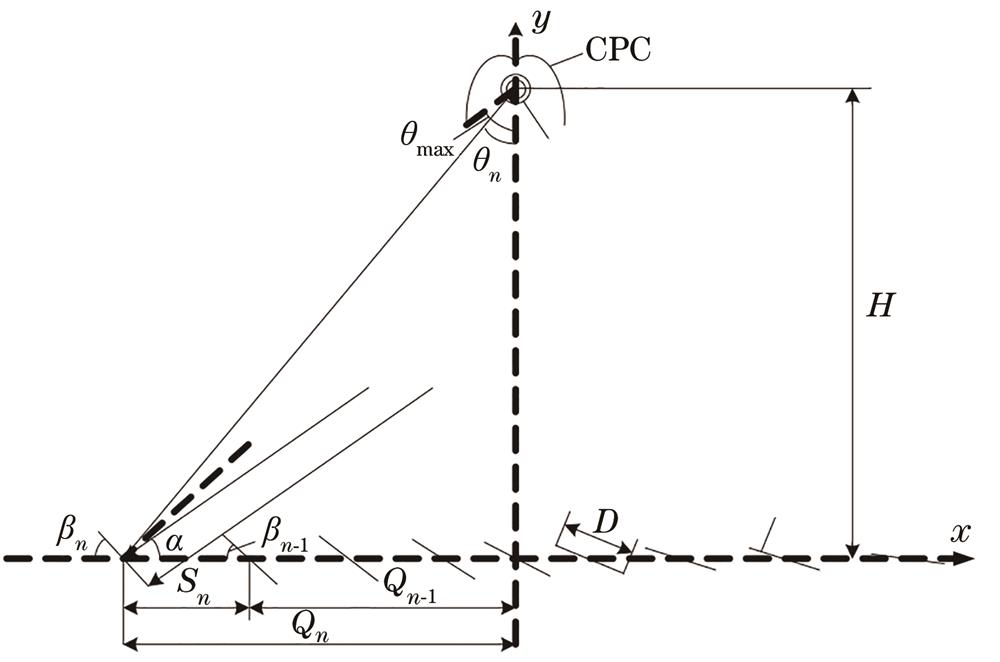
Fig. 1. Linear Fresnel concentrator
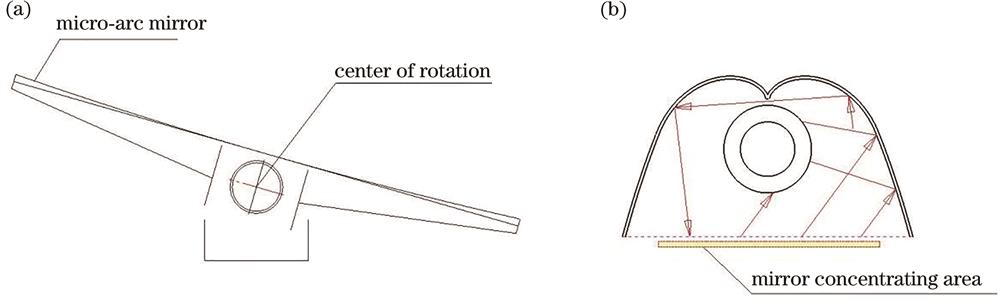
Fig. 2. Linear Fresnel system reflector. (a) Micro-arc primary reflector; (b) CPC secondary reflector
Fig. 3. Tracking angle deviation caused by south-north deviation of mirror field. (a)
Fig. 4. Schematic of CPC horizontal and vertical installation errors
Fig. 5. Tracking angle deviation due to CPC installation error. (a) Vertical installation error; (b) horizontal installation error
Fig. 6. Schematic of trajectory of primary mirror. (a) Rotation diagram; (b) trajectory geometry
Fig. 7. Tracking angle deviation caused by trajectory change
Fig. 8. Influence of temperature on output error of inclination sensor
Fig. 9. Convergence of light under tracking deviation. (a) Δ=-0.1°; (b) Δ=0.1°; (c) Δ=-0.2°; (d) Δ=0.2°
Fig. 10. Theoretical and measured tracking angle curve
Fig. 11. Theoretical and measured tracking angle deviation curve
Fig. 12. Actual tracking angle deviation after compensation
Fig. 13. Actual tracking renderings
|
Table 1. Theoretical and measured tracking angle error analysis
|
Table 2. Theoretical and measured tracking angle error analysis after compensation

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20