
Chen Hongfang, Zhang Shuang, Liang Chaowei, Tang Liang, Shi Zhaoyao. Method for Volume Error Calibration of CMM Based on Inverse-Distance Weighting Algorithm[J]. Chinese Journal of Lasers, 2020, 47(12): 1204001
- Chinese Journal of Lasers
- Vol. 47, Issue 12, 1204001 (2020)
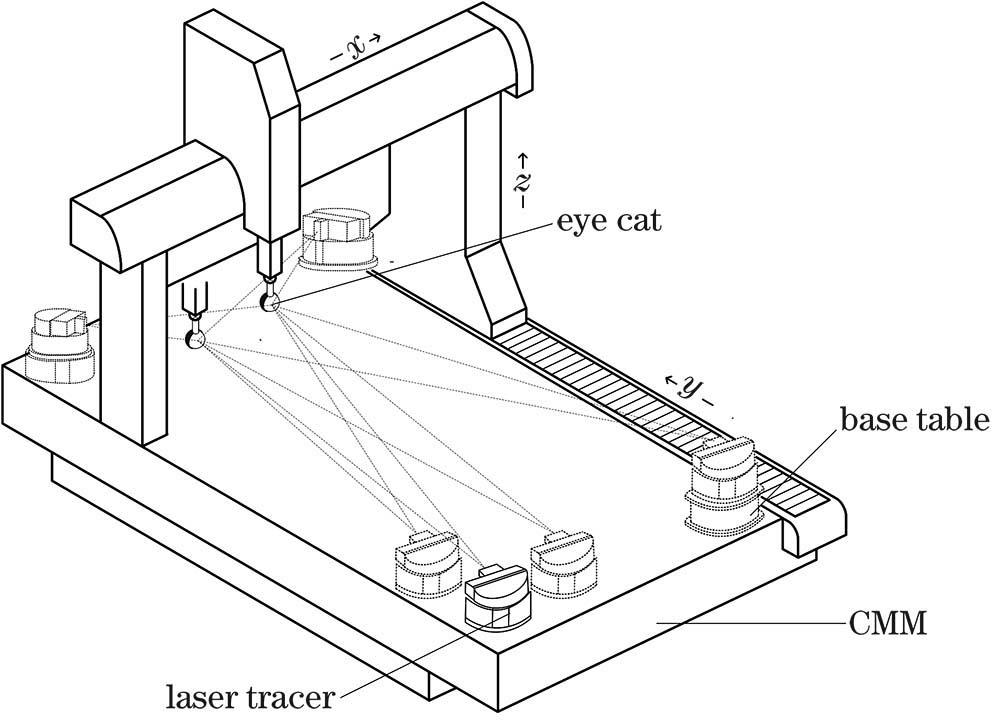
Fig. 1. Schematic of laser tracing multi-station measurement system
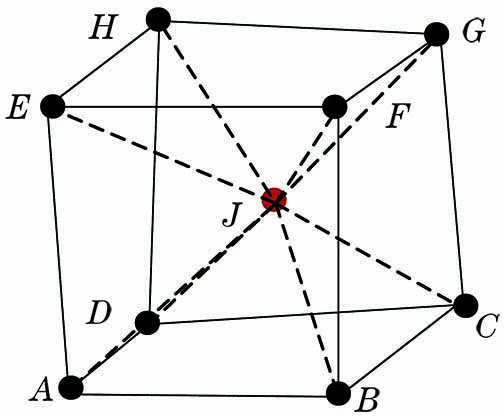
Fig. 2. Schematic of smallest hexahedron which contains point J
Fig. 3. Laser tracing multi-station measurement system
Fig. 4. Spatial distribution of sampling points (circle is interpolation sample data, and asterisk is accuracy evaluation data)
Fig. 5. IDW interpolation results. (a) Volume error in x direction; (b) volume error in y direction; (c) volume error in z direction
Fig. 6. Difference between volume error obtained by IDW algorithm and volume error measured by laser tracing multi-station measurement system
Fig. 7. Schematic of trilinear interpolation model
Fig. 8. Volume error results obtained by trilinear interpolation algorithm. (a) Volume error in x direction; (b) volume error in y direction; (c) volume error in z direction
|
Table 1. Theoretical station coordinates of laser tracer
|
Table 2. Position coordinates of laser tracer when CMM has errors
|
Table 3. Calibration errors of station coordinates
|
Table 4. Station coordinates of laser tracer and initial measurement distances
| |||||||||||||||||||||||||||||||||||||||||||
Table 5. Algorithm accuracy

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20