
Qiongying Lü, Yuan Xie, Guozhen Mu, Bing Jia. Velocity Measurement Method Based on Single-Frame Multiple Local Exposures[J]. Laser & Optoelectronics Progress, 2020, 57(22): 221508
- Laser & Optoelectronics Progress
- Vol. 57, Issue 22, 221508 (2020)
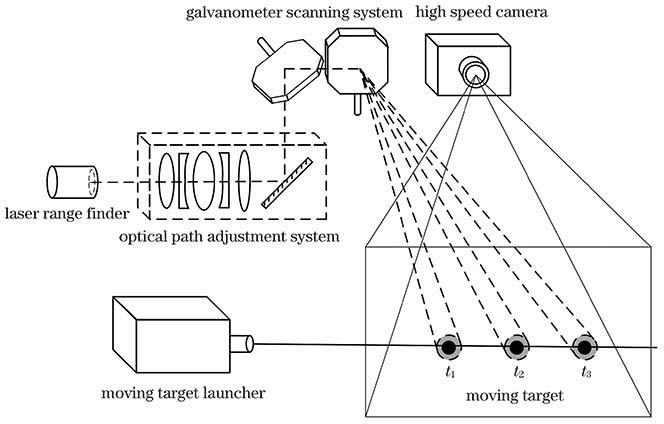
Fig. 1. Layout sketch of velocity measurement system
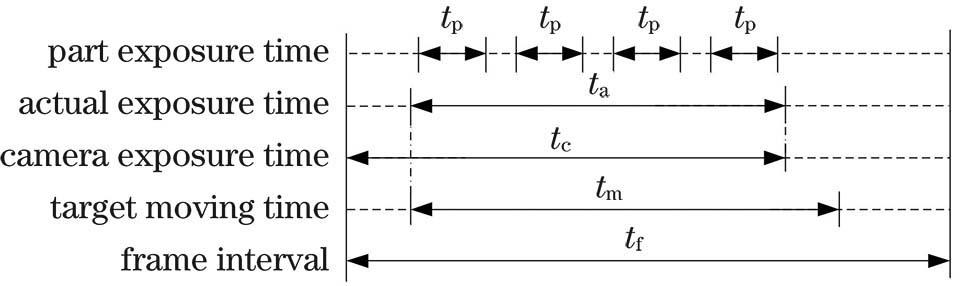
Fig. 2. Numbers of target local exposures in single frame when
Fig. 3. Numbers of target local exposures in the first frame when
Fig. 4. Numbers of target local exposures in the last frame when
Fig. 5. Numbers of target local exposures in a middle frame when
Fig. 6. Model of monocular vision positioning
Fig. 7. Moving target in galvanometer coordinates
Fig. 8. Imaging model for local exposure
Fig. 9. Velocity measurement errors at different target velocities
Fig. 10. Relative velocity measurement error at different target velocities
Fig. 11. Maximum numbers of local exposures under different target velocities
Fig. 12. Local exposure track of galvanometer scanning
Fig. 13. Moving target obtained by multiple partial exposures in a single frame. (a) Experiment1; (b) experiment2
Fig. 14. Results of target velocity measurement
Fig. 15. Relative velocity measurement error (take initial velocity as true value)
Fig. 16. Relative velocity measurement error (take the average velocity as the true value)
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Data measured by camera and laser range finder

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20