
Wen Yang, Mingquan Zhou, Bao Guo, Guohua Geng, Xiaoning Liu, Yangyang Liu. Skull Point Cloud Registration Method Based on Curvature Maps[J]. Acta Optica Sinica, 2020, 40(16): 1610002
- Acta Optica Sinica
- Vol. 40, Issue 16, 1610002 (2020)
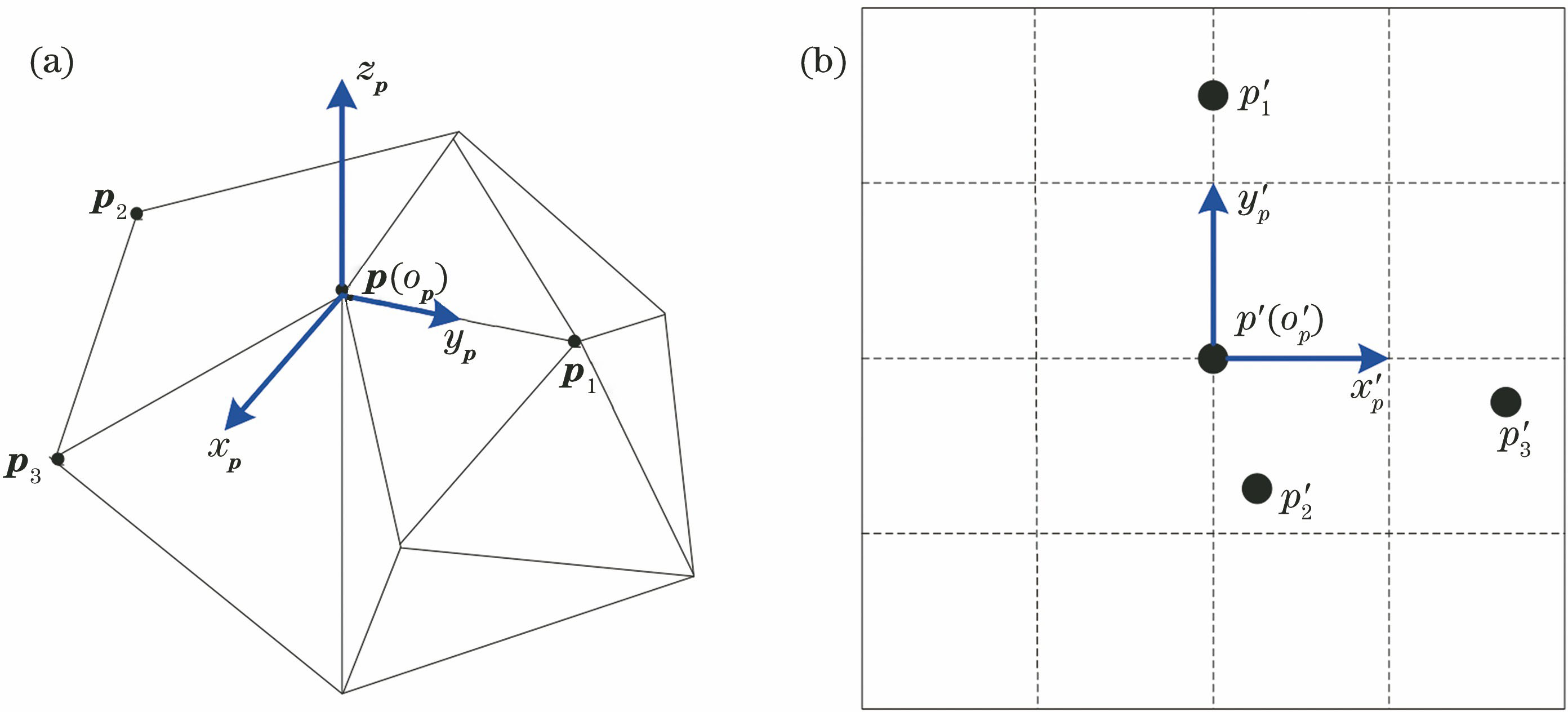
Fig. 1. Diagram of local coordinate system and point projection. (a) Feature point p and its neighborhood point {pi} in local coordinate system op-xpypzp; (b) projection points on two-dimensional plane
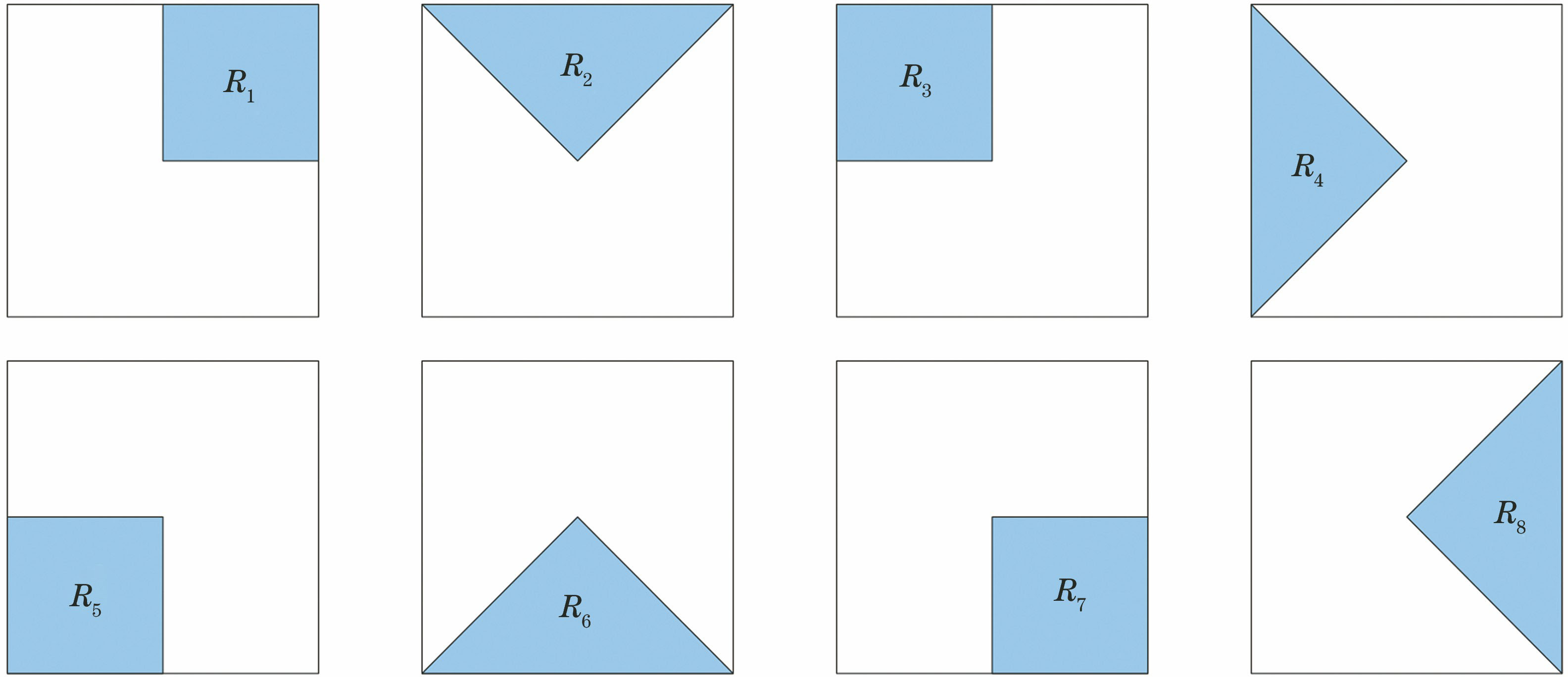
Fig. 2. Sub-regions of regional curvature map
Fig. 3. Flow chart of proposed algorithm
Fig. 4. Iterative convergence curve
Fig. 5. Skull point cloud models to be registered
Fig. 6. Registration results of different rough registration methods. (a) PCA; (b) GA; (c) FPFH; (d) proposed method
Fig. 7. Two skulls to be registered
Fig. 8. Coarse registration results
Fig. 9. Fine registration results of ICP algorithm
Fig. 10. Fine registration results of improved ICP algorithm
Fig. 11. Initial position
Fig. 12. Coarse registration result
Fig. 13. Fine registration results of ICP algorithm
Fig. 14. Fine registration results of improved ICP algorithm
|
Table 1. Comparison of registration efficiency of different rough registration methods
|
Table 2. Comparison of registration efficiency of skull point clouds
|
Table 3. Comparison of registration efficiency of bunny point clouds
|
Table 4. Efficiency comparison of different registration algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20