
Yanyangshuo Liu, Bin Liu, Jinxiao Pan. Synthetic Aperture Imaging Algorithm Via Foreground Removing[J]. Acta Optica Sinica, 2018, 38(6): 0611002
- Acta Optica Sinica
- Vol. 38, Issue 6, 0611002 (2018)
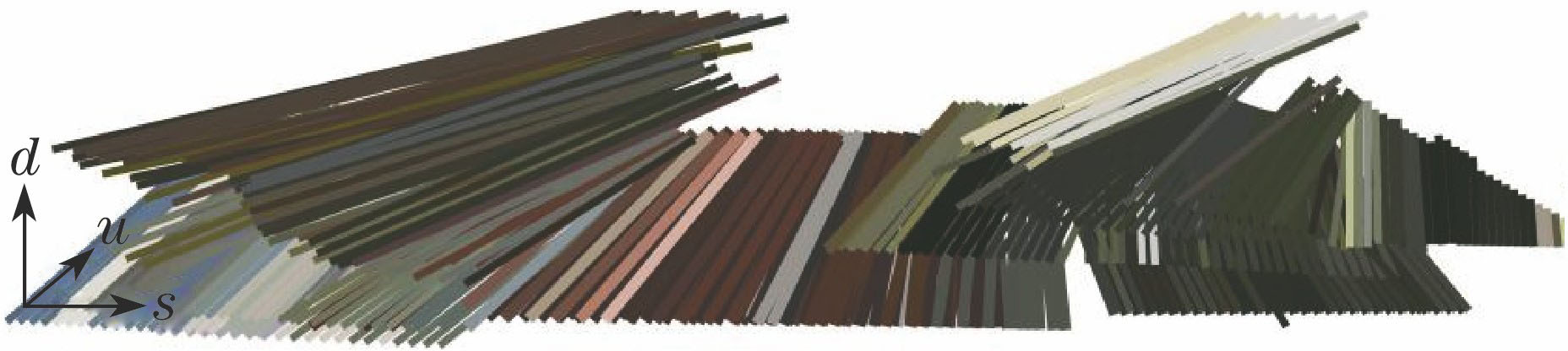
Fig. 1. Layered expression for edge disparity in all EPIs according disparity

Fig. 2. Foreground depth propagation image of camera view
Fig. 3. Foreground labeled image of camera view
Fig. 4. Camera view images after removing foreground occlusion
Fig. 5. Relationship between disparity and view shifted in EPI
Fig. 6. Camera view images on the specific depth plane after removing occlusion
Fig. 7. Algorithm workflow
Fig. 8. Reconstructed results of outdoor occluded objects with the traditional synthetic aperture imaging and our algorithm. (a) Image of camera view in the Disney dataset; (b) an foreground labeled image of camera view, the foreground disparity range is about [10.5,13.2]; (c) reconstructed images with the traditional synthetic aperture imaging, focusing on the red frame areas, respectively; (d) reconstructed images with our algorithm, focusing on the same red frame areas, respectively, and the disparit
Fig. 9. (a) Foreground depth propagation image of camera view; (b) foreground labeled image of camera view
Fig. 10. Images after removing foreground plants from scene
Fig. 11. Details of reconstructed CD cases behind the plant with different algorithms. (a1) The traditional synthetic aperture imaging, focusing on the left CD case; (a2) the traditional synthetic aperture imaging, focusing on the right CD case; (b1) our algorithm, focusing on the left CD case; (b2) our algorithm, focusing on the right CD case; (c1) the algorithm in ref.[12], focusing on the left CD case; (c2) the algorithm in ref.[12], focusing on the right CD case
Fig. 12. PSNR of reconstructed CD cases images with different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20