
Minyang Wu, Jianjun Guo, Ming Jiang. Calibration Method of Microscopic Three-Dimensional Digital Image Correlation System Based on Fixed-Point Rotation[J]. Acta Optica Sinica, 2018, 38(12): 1215010
- Acta Optica Sinica
- Vol. 38, Issue 12, 1215010 (2018)
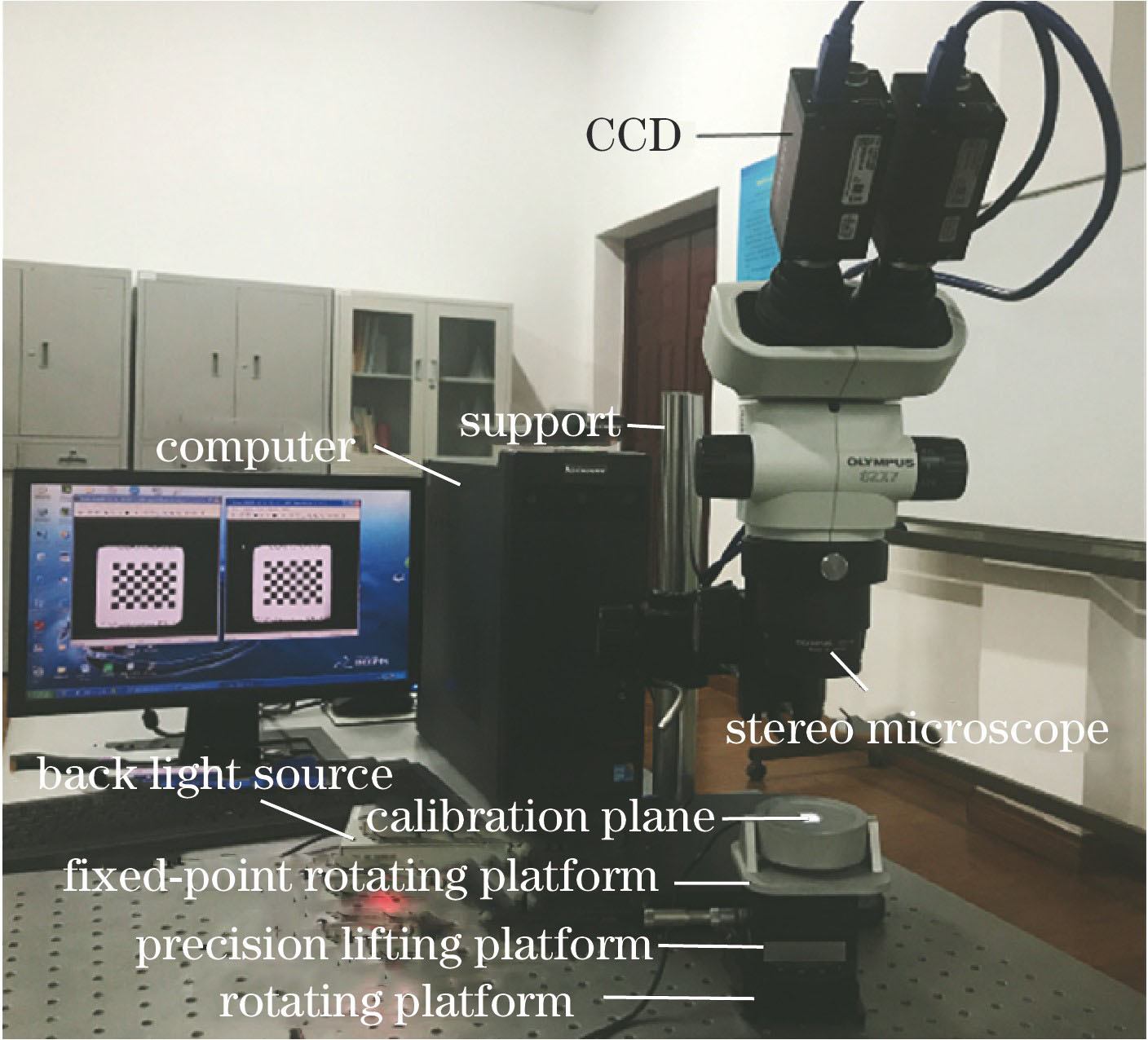
Fig. 1. Microscopic three-dimensional digital image correlation system
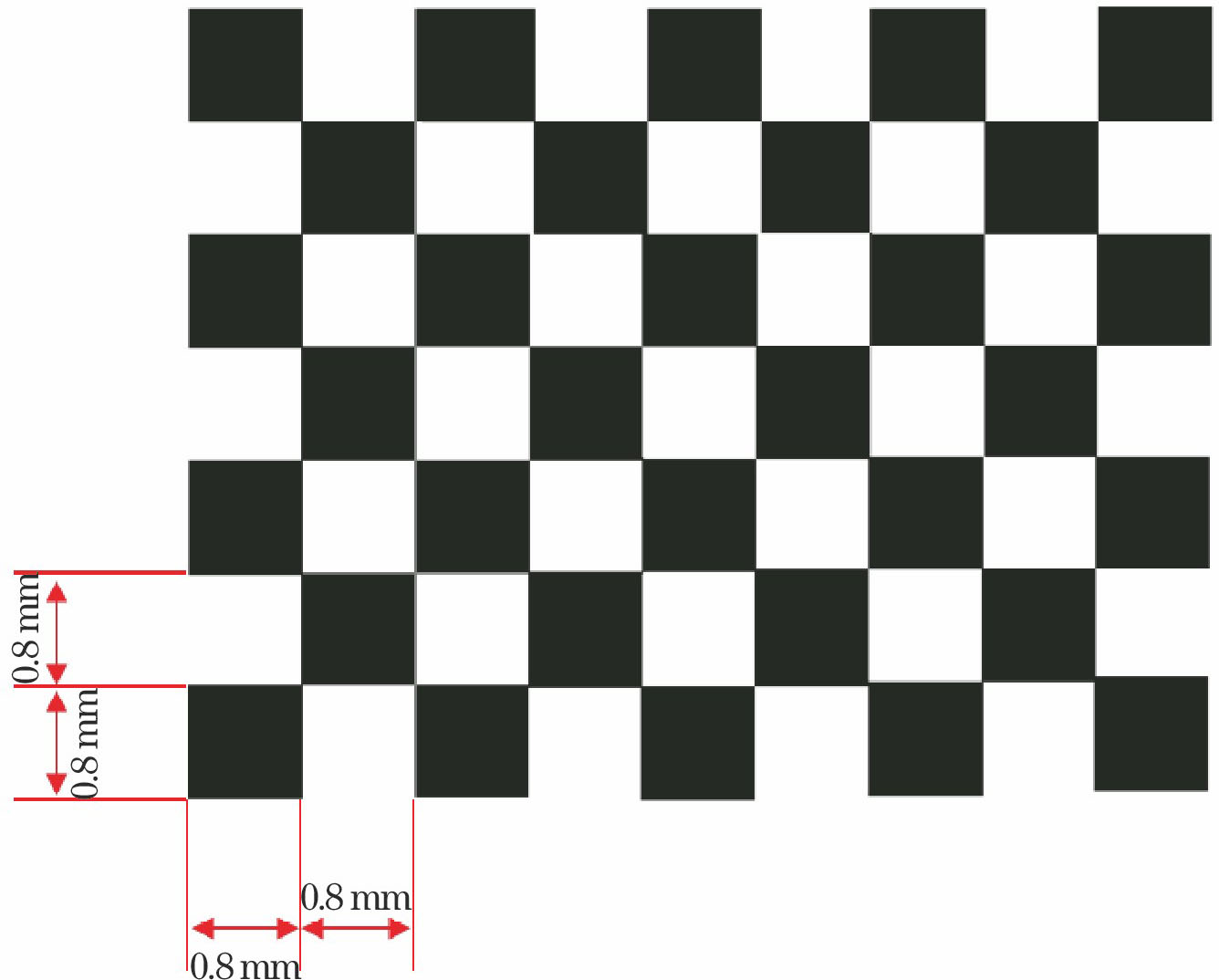
Fig. 2. Chess board calibration plate
Fig. 3. Fixed-point rotation platform. (a) CAD diagram; (b) physical drawing
Fig. 4. Optical path of stereo microscope
Fig. 5. Relationship between inclination angle and depth of field
Fig. 6. Process of image acquisition of calibration plate. (a) Fixed-point rotation of calibration plate; (b) image acquisition of calibration plate (left CCD)
Fig. 7. Schematic of main point calibration. (a) Calibration images under different magnification; (b) fitting of projection point coordinates
Fig. 8. Main point coordinates for 22 times calibration
Fig. 9. Reprojection errors
Fig. 10. Rotation angle of calibration plate around Z axis when intervals of calibration plate rotation around Z axis are 5°, 10° and 15°, respectively. (a) Left sub optical path; (b) right sub optical path
Fig. 11. Relative translation quantities of left and right sub optical paths. (a) Calibration plate rotating around Z-axis with 5°; (b) calibration plate rotating around Z-axis with 10°
Fig. 12. Overall errors of calibration board under different attitudes
Fig. 13. Influence of attitude number of right CCD on stability of calibration results. (a) Focal length versus attitude number; (b) main point coordinate versus attitude number; (c) radial distortion coefficient versus attitude number; (d) relative error versus attitude number
Fig. 14. Three-dimensional average displacement vector
Fig. 15. Picture of coin
Fig. 16. Coin speckle maps from left and right CCDs. (a) Left CCD; (b) right CCD
Fig. 17. Three-dimensional shape measurement chart of coin
|
Table 1. Depths of field and fields of view under different magnification
|
Table 2. Internal parameters
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Line fitting table
|
Table 4. Internal parameter calibration results of CCD
|
Table 5. Measurement results for movement in Z direction

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20