
Junwei Cheng, Zhenming He, Yuhao Guo, Bo Wu, Hailong Zhou, Teyan Chen, Yixin Wu, Wenwei Xu, Jianji Dong, Xinliang Zhang, "Self-calibrating microring synapse with dual-wavelength synchronization," Photonics Res. 11, 347 (2023)
- Photonics Research
- Vol. 11, Issue 2, 347 (2023)
Abstract
1. INTRODUCTION
Performing analog computation using optical hardware is an emerging computing paradigm based on light propagation for solving cutting-edge scientific issues such as deep learning [1–7], reservoir computing [8–10], and Ising machine [11–13]. Complicated artificial intelligence (AI) systems can often be abstracted into intuitive mathematical models and thus can be represented by numerous vectors and matrices, such as layers of neurons (represented as vectors) and synaptic weights (represented as matrices) in a neural network [14–16]. On the basis of mathematical models, numerical linear algebra describes methods for performing various operations, such as matrix-vector multiplication (MVM) and matrix inversion, which are capable of extracting and processing valuable information from complicated mathematical models. Limited by Moore’s law [17], microelectronic hardware represented by a central processing unit (CPU) and a graphics processing unit (GPU) is gradually approaching the performance limit of von Neumann architecture. Optical hardware uses photons instead of electrons to perform MVM and matrix inversion in an analog manner, which can significantly speed up the computation and reduce energy consumption and provide a faster and more energy-efficient analog computing platform to train or implement state-of-the-art AI models.
Microring resonators (MRRs) are a type of fundamental devices in photonic integrated circuits with the advantages of compact footprint, high sensitivity, and reconfigurability. Especially in optical neural networks, optical synapses based on tunable MRRs [18–23] can perform weighted summation of optical signals at different wavelengths to naturally complete MVM in one operation and can be flexibly scaled by wavelength division multiplexing (WDM) technology. Hence, this architecture is also known as a photonic “broadcast-and-weight” architecture [24]. In this architecture, the MRRs in the optical synapse correspond to the elements in the matrix, and the mapping between the transmittances of the MRRs and the element values needs to be established in advance as a look-up curve. In this way, each MRR can be straightforwardly configured according to the look-up curve without using complex algorithms such as singular value decomposition (SVD). However, the resonant structure of the MRR makes its state easily affected by thermal cross talk and environmental perturbations, which is equivalent to affecting the transmittance of the MRR at specific wavelengths. In addition, overlapping spectral responses between adjacent MRRs can also lead to inter-channel cross talk of microring synapses. As a result, the measured weight values of the MRRs will be different from those in the pre-established look-up curve; thereby the precision of the analog computation will deteriorate.
To improve the analog computing precision of microring synapses, integrated monitors are usually used to obtain the state information of the MRR, and then the state of the MRR is fine-adjusted by intelligent calibration algorithms based on feedback control. On the one hand, different types of integrated monitors for obtaining MRR state information have been proposed recently, including the integrated temperature sensor for detecting the local temperature of the MRR [25,26], the in-resonator photoconductive heaters (IRPHs) for monitoring the light intensity in waveguides [27,28], and the contactless integrated photonic probe (CLIPP) for measuring the light-intensity-dependent change of the electronic conductivity of the waveguide [29]. On the other hand, various novel calibration algorithms have been demonstrated to realize weight adjustment of the MRR and thus improve the precision of analog computations, such as the dithering signal algorithms [23,30], the feedback control algorithms for microring weight banks [31,32], the state locking algorithms [33,34], and the self-calibration algorithm based on finite impulse response (FIR) filters [35].
Sign up for Photonics Research TOC. Get the latest issue of Photonics Research delivered right to you!Sign up now
However, commercial integrated photonic foundries are currently unable to provide special integrated optical monitors, which makes it expensive to use them to obtain the state information of the MRR and requires a customized fabrication process. In addition, high-speed information processing applications also impose extra requirements on the operation speed of the calibration algorithm. Once anomalies in the microring synapse are detected, the calibration algorithm needs to be activated immediately to complete the calibration of the MRR weights in a very short time. Although the proposed dithering signal algorithms [23,30] and gradient descent algorithms [36–39] can effectively calibrate and train the weights of synapse, it still takes several seconds to complete the whole process in the experimental demonstration.
In this paper, we propose a dual-wavelength synchronization-based self-calibration scheme for real-time weight calibration of microring synapses to improve the precision of analog optical computation. In this scheme, we can obtain the weight of each MRR and perform real-time self-calibration by introducing an additional monitoring wavelength, and up to 2-bit precision improvement is experimentally achieved. The main wavelength and the monitoring wavelength are independent of each other and are used for computation and self-calibration, respectively, and thus our self-calibrating microring synapse allows the real-time dynamic calibration of the MRRs while the computational task is being performed. We tested the performance of the self-calibrating microring synapse for real-time monitoring and compensation of weight drifts caused by environmental temperature variation. The result shows that our scheme allows the transmission spectrum of the MRR to be quickly restored to its correct position within a short time, even after environmental temperature changes. Furthermore, we use this integrated microring synapse to perform matrix inversion tasks based on Newton’s iterative method, and the results show an improvement in weighing precision from 5 bits to 7 bits, which can meet the precision requirements of most matrix inversion tasks. This work represents an important step of the integrated optical hardware towards intelligent self-calibration and high-precision analog computation.
2. PRINCIPLE AND DEVICE DESIGN
Figure 1 shows the conceptual diagram of the self-calibrating microring synapse with dual-wavelength synchronization, including the detailed working flow and the intermediate process of visualization. Our scheme is designed for a microring synapse system with multiple signal channels, and the number of wavelengths is twice the number of the MRRs, with half as the main wavelengths to perform the computing function of the microring synapse itself, and the other half serving as the monitoring wavelengths to simultaneously calibrate the weights of the MRRs. Specifically, for one MRR in a microring synapse, in addition to the main wavelength, we set a monitoring wavelength fixed on the adjacent resonant peak of the main resonant peak of the MRR, and the two are always separated by a constant free spectral range (FSR). The monitoring wavelengths enter each signal channel together with the main wavelengths through the WDM and can be individually separated at the microring synapse’s output port by a wavelength demultiplexer (DeMUX) and then captured synchronously by a high-speed optical power meter. Since the monitoring wavelengths and the main wavelengths share the same optical path, each individually separated monitoring wavelength can reflect the weight of the corresponding MRR in real time.
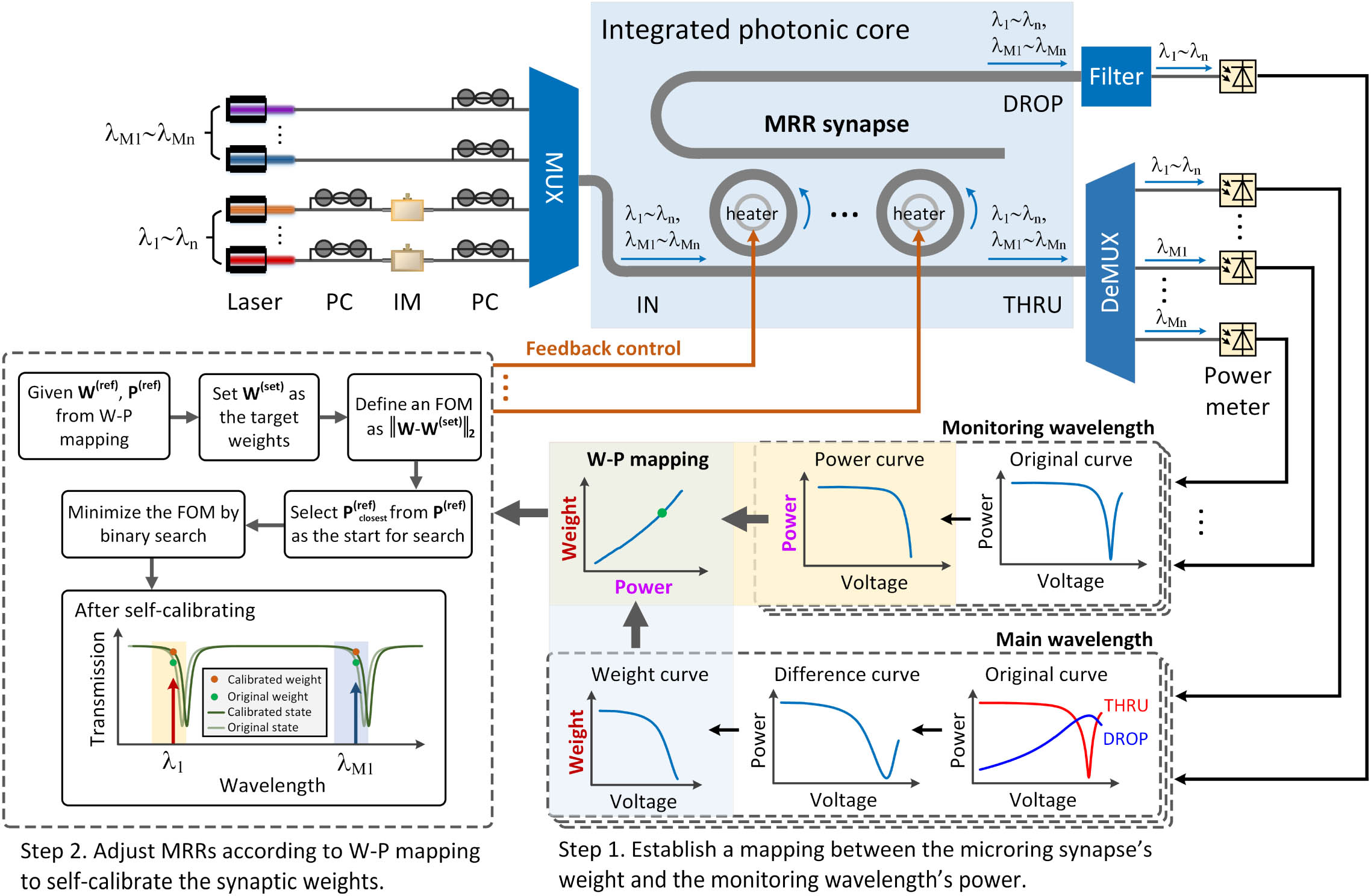
Figure 1.Conceptual diagram of the self-calibrating microring synapse with dual-wavelength synchronization. Monitoring wavelengths are added to monitor and calibrate the synaptic weights, and a thermally insensitive mapping between the synaptic weights and monitoring wavelengths can be established to provide accurate initial reference points for the parameter update procedure.
The self-calibration process can be summarized as two steps. The first step is to establish a mapping between the weights of the microring synapse and the power of the monitoring wavelength, and the second step is to adjust the microheater of the MRR to calibrate its weights. In the first step, the main wavelength is detected at the through (THRU) port and the drop (DROP) port, and then the weight-voltage (W-V) lookup curves can be established through differential processing. These W-V lookup curves provide initial reference points for self-calibration. At the same time, the corresponding power-voltage (P-V) lookup curves can be established by separately detecting the monitoring wavelengths at the THRU port. These P-V lookup curves show the mapping between the power of the monitoring wavelengths and the voltages applied to the MRRs, and the voltages also determine the weights of these MRRs. It should be noted that due to the synchronization of the dual wavelengths, the optical power of the monitoring wavelength and the weight of the main wavelength are synchronized, resulting in one-to-one mapping, which is also the premise of the validity of the proposed scheme. Next, we can obtain the weight-power (W-P) lookup curves by the already established W-V lookup curves and the P-V lookup curves, which directly correspond the weight information carried by the main wavelengths to the power of the monitoring wavelengths. The subsequent self-calibration process will be based on the W-P lookup curves established here. For one MRR in a microring synapse, there is a specific W-P lookup curve corresponding to it, which includes a weight set,
In the second step, our self-calibration goal is to make the measured weights
Figure 2 shows the design details of the microring synapse. The device is designed on a silicon-on-insulator (SOI) platform with a 220-nm-thick silicon and a 2-μm-thick buried oxide layer, featuring a compact size of
![]()
Figure 2.Detailed design of the integrated microring synapse. (a) The schematic structure of the
The device is characterized by the experimental set-up that contains a C+L ASE light source (Amonics ALS-CL-15), a versatile tunable laser (ID Photonics CoBrite DX4), a custom programmable voltage source, an optical spectrum analyzer (Yokogawa AQ6370C), a multi-channel optical power meter (Luster OPM-1008), an optical tunable filter (Santec OTF-350), and two wavelength selective switches (Finisar WSS). The light polarization is controlled by a polarization beam splitter and a polarization controller before coupling into the grating coupler of the device under test. The loss of each grating coupler is measured to be around 3 dB at the central wavelength of 1550 nm.
3. RESULTS
In this section, we first experimentally validate the effectiveness of the proposed self-calibrating microring synapse with dual-wavelength synchronization, including two aspects: improved computing precision and robustness to environmental temperature changes. Next, we demonstrate the success of this self-calibrating microring synapse for matrix inversion tasks.
A. Precision Test of the Two-MRR Synapse System
Precision is always an important index for analog computing hardware, which determines its ability to deal with precision-demanded problems. State-of-the-art microelectronic hardware for AI computing, such as the Intel Loihi [40] and the Google tensor processing unit (TPU) [41], has 8-bit precision or higher. However, most optical synapses are limited to relatively low precision, typically 2 bits lower than that of microelectronic hardware, and thus there is an urgent need for an effective approach to improving the precision of optical hardware to meet the growing demand for AI applications.
To show the effectiveness of the self-calibration scheme, we first tested the precision performance of an individual MRR. Before the self-calibration, we established the mapping between the MRR weights and the optical power of the monitoring wavelength, which is the W-P lookup curve mentioned above. Then, a main wavelength and a monitoring wavelength are simultaneously injected from the input port to evaluate the performance of the MRR. We swept the optical power of the monitoring wavelength by tuning the voltages applied to the TiN heater of the MRR to change the weights in equally spaced increments within the [–1, 1] interval. Figure 3 shows the comparison of the calibrated weights and theoretical weights of the individual MRR of the microring synapse. The blue dashed line (corresponding to the left vertical axis) indicates the W-P lookup curve established in advance, while the green dots (corresponding to the left vertical axis) represent the experimental calibrated weights obtained by the MRR self-calibrating scheme based on dual-wavelength synchronization. The error between these two weight values is calculated and plotted as the orange curve (corresponding to the right vertical axis). Results show that the error is basically within 1% over the whole weight range, [–1, 1], which confirms the effectiveness of our self-calibrating scheme.
![]()
Figure 3.Comparison of the calibrated weights and theoretical weights of the individual MRR of the microring synapse.
To further verify the effectiveness of the self-calibration scheme in a larger-scale situation, we then evaluate the performance of the self-calibration scheme on the two-MRR synapse system. Figures 4(a) and 4(b) show the error results on the heat map before and after the self-calibration process, respectively. The two MRRs in the microring synapse are tuned to
![]()
Figure 4.The calibration with dual-wavelength synchronization improves the precision of weighting in the two-MRR synapses. (a) The measurement of the weighting precision before the self-calibration. (b) The measurement of the weighting precision after the self-calibration. The weighting precision is evaluated at equally spaced weights on the heatmap. Each sub-square in the heatmap represents the weighting error of a measured weight, and its shade represents the magnitude of the error. (c) and (d) are the weighting error for the evaluation in (a) and (b), respectively, calculated as
Figures 4(c) and 4(d) show the aggregation of the errors derived from Figs. 4(a) and 4(b), respectively. The error points of weights are calculated as
B. Robustness Test against Temperature Fluctuations
As a typical class of resonant devices, MRRs usually have a high Q factor and high sensitivity to temperature variations, and thus can be designed as temperature sensors [25,26]. However, the temperature sensitivity of the MRR makes it difficult to maintain the stability of the weights of the MRR when the environmental temperature fluctuates, which leads to a serious deterioration of the precision for analog optical computations.
To resolve this issue, we applied our self-calibration scheme to the microring synapse and tested its robust performance against temperature fluctuations. As shown in Fig. 5, the tested weights consist of positive [Fig. 5(a)], zero [Fig. 5(b)], and negative weights [Figs. 5(c) and 5(d)], respectively. The whole test process contains three steps, including (I) origin, (II) temperature changes, and (III) weight self-calibrating. In the first step, we set the weights of the MRR to the target weights (
![]()
Figure 5.Robust performance of the self-calibrating microring synapse against environmental temperature fluctuations. The tested weights consist of positive, zero, and negative weights, including weight of (a) 0.3, (b) 0, (c)
According to our experimental experience, current temperature variation range is close to the maximum range of temperature variations that our microring synapse and self-calibration algorithm can support. If the temperature variation range is further increased, the spectrum shift will be too large, which may cause the main wavelength and monitoring wavelength to shift out of the resonance peaks, and the microring cannot be calibrated back to the correct weight. Actually, the current temperature variation range is much larger than the fluctuation of the environmental temperature in usual experiments. As shown in Fig. 5, the weight will change dramatically due to the temperature variation, such as changing from 0.3 to 0.7, or even from
C. Demonstration of Matrix Inversion Tasks
In the era of big data, where matrix inversion is an important and fundamental linear algebra operation, modern AI models are usually converted to linear algebra problems to support the heavy workload. Compared to the MVM, matrix inversion is more computationally complex and usually needs to be solved by iteration-based methods. For an
![]()
Figure 6.Simulation results of Newton’s iterative method for matrix inversion tasks with bit precision of 4 bits, 5 bits, 6 bits, 7 bits, and 8 bits.
To further evaluate the practical precision performance of the proposed microring synapse, we experimentally demonstrate the Newton’s iteration-based matrix inversion task implemented by the proposed microring synapse. The task is to perform Newton iteration using optical hardware to calculate the inverse matrix of the given initial matrix, and the schematic of the computation flow is shown in Fig. 7(a). For an individual Newton’s iteration, MVM operations are optically performed by the photonic MRR synapses, and the subtraction operation of the output values of the MRR synapses is electrically executed on the customed FPGA circuit. Without loss of generality, we test several different initial matrices. The test results show that matrix inversion in the real domain can be successfully implemented, and Fig. 7 shows the matrix inversion based on Newton’s iteration for two different initial matrices
![]()
Figure 7.Matrix inversion based on Newton’s iteration for two different initial matrices. (a) The implementation of an individual Newton’s iteration expressed by Eq. (
Figure 7(b) shows the theoretical and experimental results for the inversion of matrix
4. DISCUSSION
Feedback weight calibration is essential to a microring synapse system with stability and dynamic operation ability. In our scheme, the concepts of monitoring wavelength and dual-wavelength synchronization are first proposed and demonstrated for the weight calibration of the microring synapses. Since the monitoring wavelengths and the main wavelengths used for computations are separated by one FSR and do not overlap, they are independent of each other, and changes in the amplitude of the input signal modulated by the intensity modulators do not affect the monitoring of the MRR weights. The MRR weight information carried by the main wavelengths can be obtained based on the synchronized monitoring wavelengths and the pre-established mapping. Table 1 summarizes the comparison of our weight monitoring scheme with three mainstream schemes in terms of several metrics.
Comparison of Our Weight Monitoring Scheme with Three Mainstream Schemes
| Tap Coupler | Temperature Sensor | Dithering Control | Dual-wavelength | |
|---|---|---|---|---|
| Independent Monitoring | No | Yes | Yes | Yes |
| Immunity to Temperature Fluctuations | No | No | No | Yes |
| Precision Improvement | 1–2 bits | 1–2 bits | 2–4 bits | |
| Extra Power Loss | Required | Not required | Not required | Not required |
| Scalability | Limited by power loss | Limited by fabrication process | Limited by calibration speed | Strong (benefit from optical combs) |
Compared with previous works, our scheme has several advantages.
Although our scheme achieves a precision improvement of 2 bits, it still falls short of the current highest precision record. Admittedly, the main limitation of our present work is the lack of the entire optical link consisting of the laser load, the intensity modulators, the radio frequency signal, the microring synapse, and the power meters. In particular, our scheme requires a constant interval between the monitoring wavelength and the main wavelength, and hence the wavelength instability of the laser will lead to errors. We believe that with the realization of the entire optical link monitoring, our scheme will be able to achieve precision comparable to the current state-of-the-art records.
5. CONCLUSION
In summary, we propose and demonstrate a self-calibration scheme with dual-wavelength synchronization, featuring the monitoring wavelengths independently parallel from computations and a thermally insensitive W-P mapping for the weight calibration of the microring synapses. To boost the calibration speed, on-demand FPGA circuits are designed to replace bulky instruments, while feedback control and fine-tuning of the MRRs are performed based on binary search algorithms and W-P mapping. We test the integrated microring synapse in terms of the precision improvement of the synaptic weights and the robustness against temperature fluctuations to evaluate the practical effectiveness of the scheme. As an optoelectronic hybrid closed-loop feedback control, this scheme supports fast-converging parameter update and iteration, which enables 2-bit precision improvement for the microring synapse. Moreover, our scheme is immune to the environmental temperature fluctuations, and the weights can be corrected within 1 s after the temperature changes 0.5°C. In addition, we demonstrate Newton iterations beyond 7-bit precision realized by MRRs and perform matrix inversion tasks in the real-value domain. Our self-calibration scheme paves the way for analog optical computing, especially overcoming the environmental vulnerability of resonator-based architectures, such as microring synapses, to perform high-precision computational tasks on optical hardware.
References
[17] M. Lundstrom. Moore’s law forever?. Science, 299, 210-211(2003).
[39] J. Cheng, W. Zhang, W. Gu, H. Zhou, J. Dong, X. Zhang. Photonic emulator for inverse design. ACS Photon..


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20