
Yunpeng Li, Baozhen Ge, Qingguo Tian, Lü Qieni. Unbalanced Defocus Dataset Construction Based on Stereo Image Pair Dataset[J]. Acta Optica Sinica, 2022, 42(14): 1415001
- Acta Optica Sinica
- Vol. 42, Issue 14, 1415001 (2022)
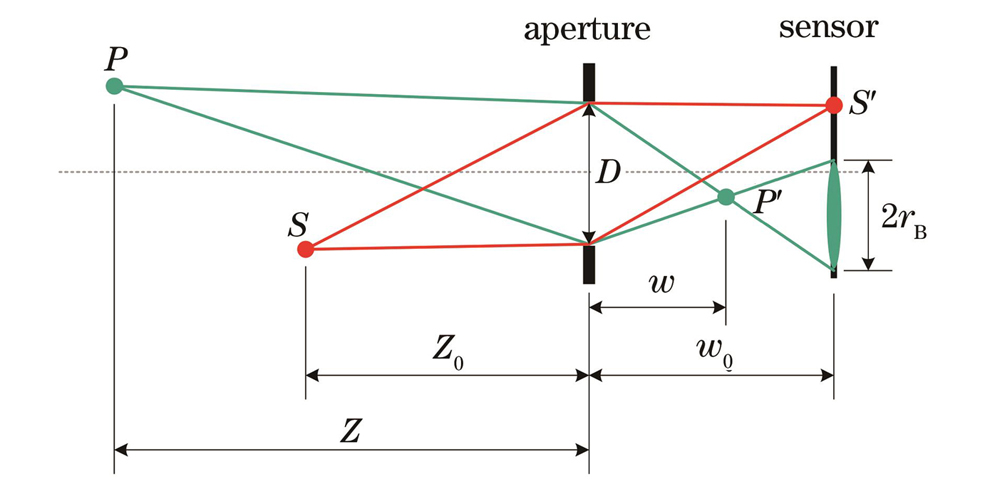
Fig. 1. Depth-dependent radius of blur kernel

Fig. 2. Data samples in unbalanced defocus stereo vision dataset. (a1)-(a6) Left and right blur images, left and right clear images, and left and right disparity maps of No. 0 data; (b1)-(b6) left and right blur images, left and right clear images, and left and right disparity maps of No. 2000 data
Fig. 3. Visualized deblurred results of synthetic image. (a1)-(a5) Left blur image, deblurred left images by Nah, DavaNet, and BLNet, and clear left image of No. 0 data; (b1)-(b5) right blur image, deblurred right images by Nah, DavaNet, and BLNet, and clear right image of No. 0 data; (c1)-(c5) left blur image, deblurred left images by Nah, DavaNet, and BLNet, and clear left image of No. 2000 data; (d1)-(d5) right blur image, deblurred right images by Nah, DavaNet, and BLNet, and clear right image of No. 2000 data; (e1)-(e5) left blur image, deblurred left images by Nah, DavaNet, and BLNet, and clear left image of No. 4000 data; (f1)-(f5) right blur image, deblurred right images by Nah, DavaNet, and BLNet, and clear right image of No. 4000 data
Fig. 4. Visualized deblurred results of real-scene images in Middlebury 2014 dataset. (a1)-(a5) Left blur image, deblurred left images by Nah, DavaNet, and BLNet, and clear left image of Adirondack; (b1)-(b5) right blur image, deblurred right images by Nah, DavaNet, and BLNet, and clear right image of Adirondack; (c1)-(c5) left blur image, deblurred left images by Nah, DavaNet, and BLNet, and clear left image of Motorcycle; (d1)-(d5) right blur image, deblurred right images by Nah, DavaNet, and BLNet, and clear right image of Motorcycle
Fig. 5. Visualized stereo matching results of synthetic image. (a1)-(a5) Left and right blur images, disparity maps of PSMNet-C and PSMNet-B, and ground-truth disparity map of No. 0 data; (b1)-(b5) left and right blur images, disparity maps of PSMNet-C and PSMNet-B, and ground-truth disparity map of No. 2000 data; (c1)-(c5) left and right blur images, disparity maps of PSMNet-C and PSMNet-B, and ground-truth disparity map of No. 4000 data
Fig. 6. Visualized stereo matching results of real-scene images in Middlebury 2014 dataset. (a1)-(a5) Left and right blur images, disparity maps of PSMNet-C and PSMNet-B, and ground-truth disparity map of Adirondack; (b1)-(b5) left and right blur images, disparity maps of PSMNet-C and PSMNet-B, and ground-truth disparity map of Motorcycle
Fig. 7. Test on real defocus blur images. (a) Stereo vision cameras; (b) experimental scene for test; (c)(d) left and right blur images; (e)(f) deblurred left and right images by BLNet; (g) disparity map calculated by PSMNet-B; (h) reconstructed 3D point clouds
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Deblurred results of synthetic image
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Deblurred results of real-scene images in Middlebury 2014 dataset
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Stereo matching results of the synthetic data
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4. Stereo matching results of real-scene images from Middlebury 2014 dataset

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20