
Haowei Jiang, Mengyuan Chen, Xuechao Yuan. Visual Simultaneous Localization and Mapping Algorithm Combining Mixed Attention Instance Segmentation[J]. Laser & Optoelectronics Progress, 2023, 60(10): 1028008
- Laser & Optoelectronics Progress
- Vol. 60, Issue 10, 1028008 (2023)
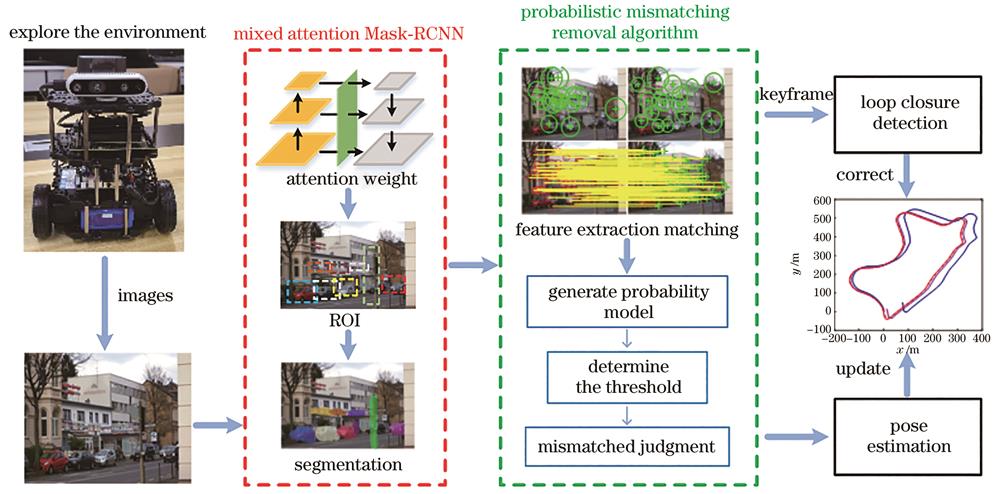
Fig. 1. System framework diagram

Fig. 2. Framework diagram of mixed attention Mask-RCNN algorithm
Fig. 3. Proposed backbone network structure
Fig. 4. Spatial attention structure
Fig. 5. Channel attention structure
Fig. 6. Flow chart of mismatching remove
Fig. 7. Instance segmentation results in 02 and 07 sequences. (a)(c) Pre-improved algorithm; (b) (d) proposed algorithm
Fig. 8. Matching results in 00 sequence. (a) SURF feature matching results; (b) ORB feature matching results; (c) proposed algorithm feature matching results
Fig. 9. Operating trajectories in different sequences on KITTI. (a) 10 sequence; (b) 01 sequence; (c) 06 sequence; (d) 07 sequence; (e) 09 sequence; (f) 00 sequence
Fig. 10. Processing time per frame on three algorithms. (a) ORB-SLAM2; (b) DS-SLAM; (c) proposed algorithm
Fig. 11. TurtleBot3 Burger
Fig. 12. Real experimental environment scene. (a) Real scene; (b) layout plan
Fig. 13. Image of pentacle position for the first time. (a) Instance segmentation result of pre-improved algorithm; (b) instance segmentation result of proposed algorithm
Fig. 14. Image of pentacle position for the second time. (a) Instance segmentation result of pre-improved algorithm; (b) instance segmentation result of proposed algorithm
Fig. 15. Operating trajectory in real scene
|
Table 1. Main parameter of mixed attention backbone network
| ||||||||||||||||||||||||||||||
Table 2. Comparison of algorithm test results in AP
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Comparison of effective matching rate and matching time on KITTI
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4. Comparison of operating results on KITTI
|
Table 5. Operation parameters setting
|
Table 6. Comparison of running results in real scene

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20